EdgeNavMamba: Mamba Optimized Object Detection for Energy Efficient Edge Devices
作者: Romina Aalishah, Mozhgan Navardi, Tinoosh Mohsenin
分类: eess.IV, cs.RO
发布日期: 2025-10-16
备注: The 11th IEEE International Conference on Edge Computing and Scalable Cloud (IEEE EdgeCom 2025)
💡 一句话要点
EdgeNavMamba:面向边缘设备的节能Mamba优化目标检测
🎯 匹配领域: 支柱二:RL算法与架构 (RL & Architecture)
关键词: 边缘计算 目标检测 Mamba模型 强化学习 自主导航 知识蒸馏 模型压缩
📋 核心要点
- 现有深度学习模型在资源受限的边缘设备上部署困难,尤其是在自主导航等实时应用中,模型效率和压缩是关键挑战。
- EdgeNavMamba利用Mamba模型的高效性,结合强化学习,实现目标导向导航,并使用自定义数据集进行训练和评估。
- 实验结果表明,EdgeNavMamba在保持性能的同时,显著降低了模型大小和能耗,并在模拟环境中实现了高导航成功率。
📝 摘要(中文)
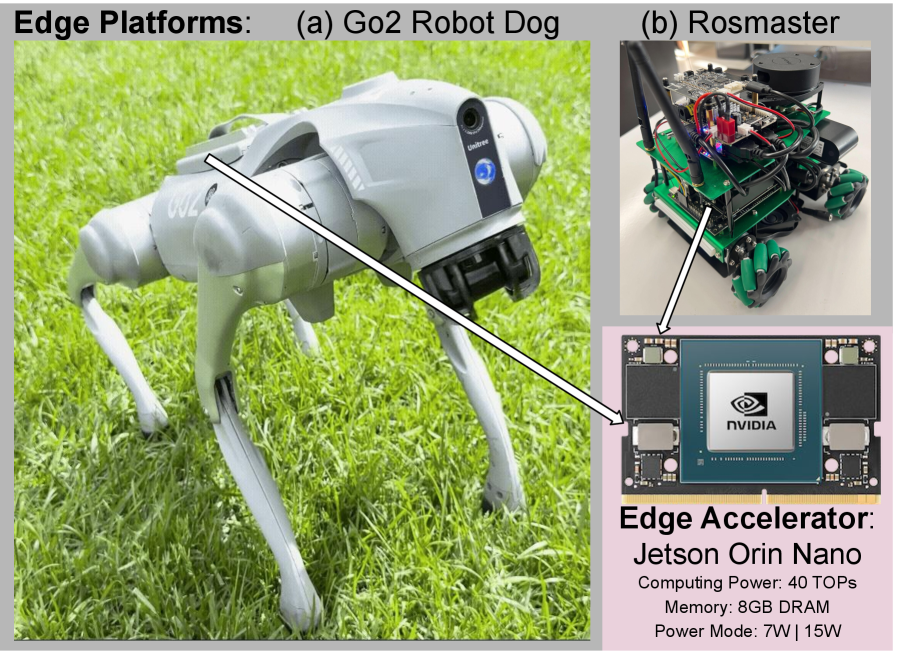
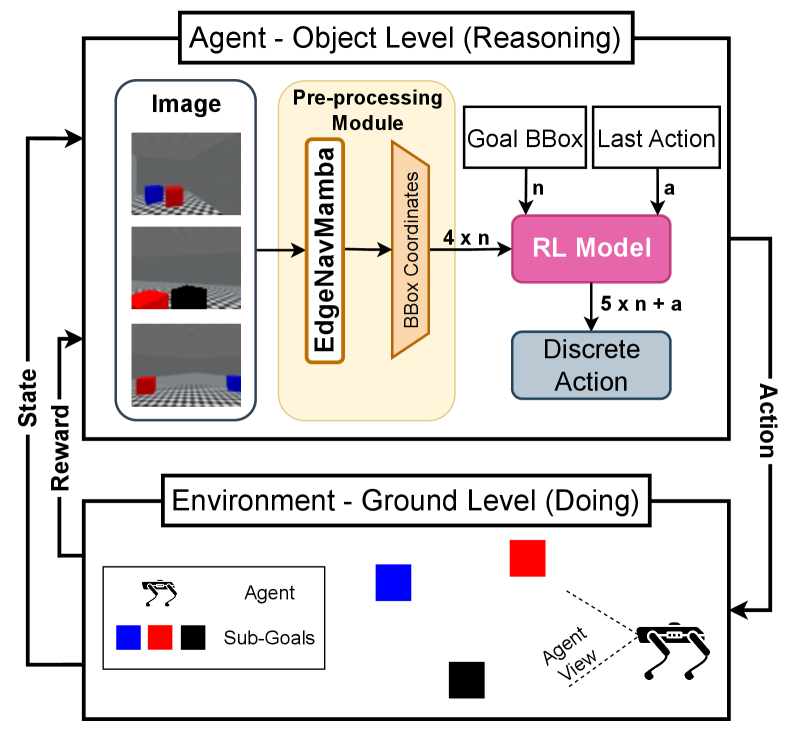
在自主导航中,高效且精确的深度学习模型的部署一直是一个挑战,尤其是在资源受限的边缘设备上的实时应用。边缘设备的计算能力和内存有限,因此模型效率和压缩至关重要。本文提出了EdgeNavMamba,一个基于强化学习的框架,用于使用高效的Mamba目标检测模型进行目标导向导航。为了训练和评估检测器,我们引入了一个自定义形状检测数据集,该数据集是在各种室内环境中收集的,反映了现实世界导航中常见的视觉线索。该目标检测器充当预处理模块,从视觉输入中提取边界框(BBOX),然后将其传递给RL策略以控制目标导向导航。实验结果表明,学生模型在NVIDIA Jetson Orin Nano和Raspberry Pi 5等边缘设备上实现了67%的尺寸缩减,以及高达73%的每次推理能耗降低,同时保持与教师模型相同的性能。与基线相比,EdgeNavMamba还在MiniWorld和IsaacLab模拟器中保持了高检测精度,同时减少了31%的参数。在MiniWorld模拟器中,导航策略在各种复杂程度的环境中实现了超过90%的成功率。
🔬 方法详解
问题定义:论文旨在解决在资源受限的边缘设备上部署高效目标检测模型用于自主导航的问题。现有方法在计算能力和内存受限的边缘设备上难以实现实时和精确的目标检测,导致导航性能下降和能耗增加。
核心思路:论文的核心思路是利用Mamba模型的高效性,结合强化学习,设计一个轻量级且高性能的目标检测器EdgeNavMamba。通过知识蒸馏等技术,进一步压缩模型大小,降低能耗,使其能够在边缘设备上高效运行。
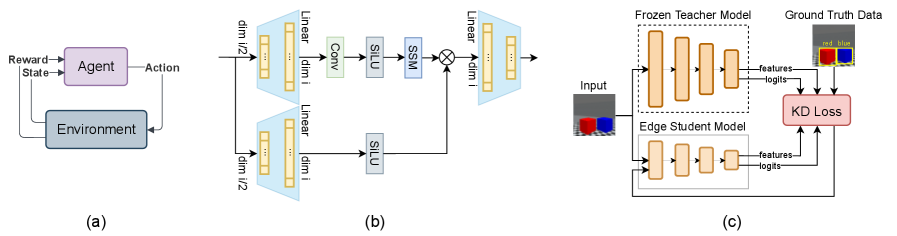
技术框架:EdgeNavMamba框架包含以下主要模块:1) 自定义形状检测数据集的构建,用于训练和评估目标检测器;2) Mamba目标检测器的设计与训练,用于从视觉输入中提取边界框;3) 强化学习策略的设计与训练,用于根据目标检测结果控制导航;4) 知识蒸馏,将教师模型的知识转移到学生模型,实现模型压缩。整体流程是从视觉输入到目标检测,再到强化学习策略控制导航。
关键创新:最重要的技术创新点在于将Mamba模型应用于目标检测,并针对边缘设备进行了优化。Mamba模型相比于传统的卷积神经网络和Transformer模型,具有更高的效率和更低的计算复杂度,更适合在资源受限的边缘设备上部署。此外,结合知识蒸馏技术,进一步压缩模型大小,降低能耗。
关键设计:论文的关键设计包括:1) 自定义形状检测数据集,包含各种室内环境下的视觉线索;2) Mamba目标检测器的网络结构设计,可能包括Mamba块的堆叠方式、通道数、激活函数等;3) 强化学习策略的设计,包括状态空间、动作空间、奖励函数等;4) 知识蒸馏的损失函数设计,用于衡量学生模型和教师模型之间的差异。
🖼️ 关键图片
📊 实验亮点
实验结果表明,EdgeNavMamba在NVIDIA Jetson Orin Nano和Raspberry Pi 5等边缘设备上实现了67%的尺寸缩减,以及高达73%的每次推理能耗降低,同时保持与教师模型相同的性能。在MiniWorld和IsaacLab模拟器中,EdgeNavMamba保持了高检测精度,同时减少了31%的参数。在MiniWorld模拟器中,导航策略实现了超过90%的成功率。
🎯 应用场景
EdgeNavMamba可应用于各种需要自主导航的场景,例如机器人导航、无人机巡检、智能家居等。该研究的实际价值在于降低了边缘设备上深度学习模型的部署成本和能耗,提高了自主导航系统的效率和可靠性。未来,EdgeNavMamba有望推动边缘计算在自主导航领域的广泛应用。
📄 摘要(原文)
Deployment of efficient and accurate Deep Learning models has long been a challenge in autonomous navigation, particularly for real-time applications on resource-constrained edge devices. Edge devices are limited in computing power and memory, making model efficiency and compression essential. In this work, we propose EdgeNavMamba, a reinforcement learning-based framework for goal-directed navigation using an efficient Mamba object detection model. To train and evaluate the detector, we introduce a custom shape detection dataset collected in diverse indoor settings, reflecting visual cues common in real-world navigation. The object detector serves as a pre-processing module, extracting bounding boxes (BBOX) from visual input, which are then passed to an RL policy to control goal-oriented navigation. Experimental results show that the student model achieved a reduction of 67% in size, and up to 73% in energy per inference on edge devices of NVIDIA Jetson Orin Nano and Raspberry Pi 5, while keeping the same performance as the teacher model. EdgeNavMamba also maintains high detection accuracy in MiniWorld and IsaacLab simulators while reducing parameters by 31% compared to the baseline. In the MiniWorld simulator, the navigation policy achieves over 90% success across environments of varying complexity.