Open TeleDex: A Hardware-Agnostic Teleoperation System for Imitation Learning based Dexterous Manipulation
作者: Xu Chi, Chao Zhang, Yang Su, Lingfeng Dou, Fujia Yang, Jiakuo Zhao, Haoyu Zhou, Xiaoyou Jia, Yong Zhou, Shan An
分类: cs.RO
发布日期: 2025-10-16
备注: 17 pages
💡 一句话要点
Open TeleDex:一个硬件无关的遥操作系统,用于基于模仿学习的灵巧操作
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 遥操作 模仿学习 机器人灵巧操作 手部姿态重定向 异构机器人 数据采集 机器人控制
📋 核心要点
- 现有遥操作系统难以在异构机器人平台上保证高精度演示数据采集,限制了模仿学习的应用。
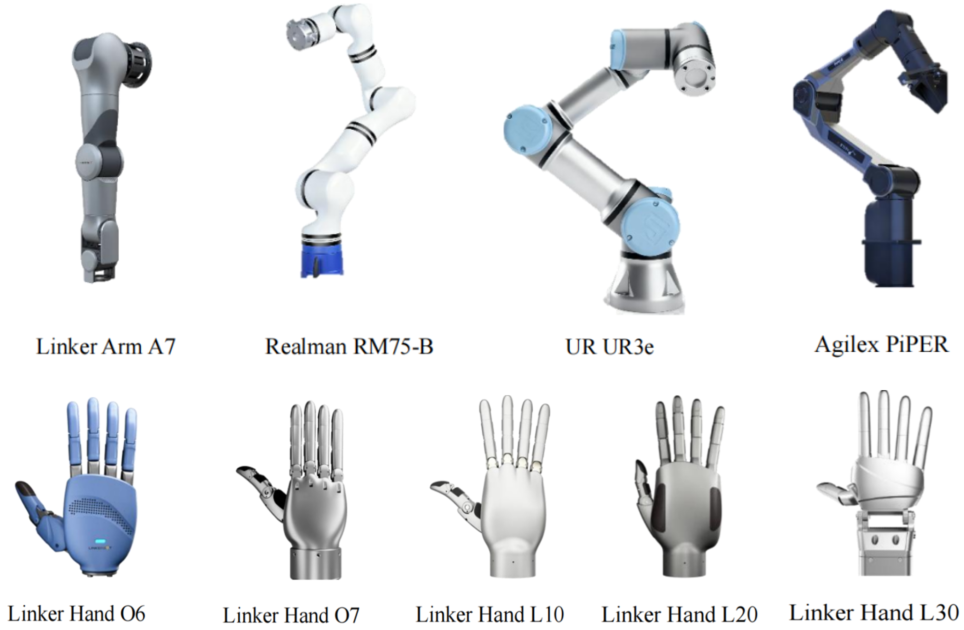
- Open TeleDex通过统一的遥操作框架,支持任意机械臂、灵巧手和输入设备,解决异构性问题。
- 提出的手部姿态重定向算法增强了系统互操作性,使其能兼容更广泛的主从设备,提升数据质量。
📝 摘要(中文)
精确和高保真的演示数据采集是部署机器人模仿学习(IL)系统的关键瓶颈,尤其是在处理异构机器人平台时。现有的遥操作系统通常无法保证跨多种遥操作设备的高精度数据收集。为了解决这个问题,我们开发了Open TeleDex,这是一个为演示数据收集而设计的统一遥操作框架。Open TeleDex专门应对TripleAny挑战,无缝支持任何机械臂、任何灵巧手和任何外部输入设备。此外,我们提出了一种新颖的手部姿态重定向算法,显著提高了Open TeleDex的互操作性,使其能够稳健且准确地兼容更广泛的异构主从设备。Open TeleDex为一个高质量、公开可用的平台奠定了基础,加速了复杂机器人操作和IL领域的学术研究和工业发展。
🔬 方法详解
问题定义:现有遥操作系统在异构机器人平台上进行模仿学习数据采集时面临挑战。不同类型的机械臂、灵巧手和输入设备之间存在差异,导致难以获得高质量、一致性的演示数据。现有方法通常针对特定硬件设计,缺乏通用性和可扩展性,限制了模仿学习在复杂机器人操作中的应用。
核心思路:Open TeleDex的核心思路是构建一个硬件无关的遥操作框架,通过统一的接口和数据处理流程,实现对不同类型机器人和输入设备的兼容。通过手部姿态重定向算法,解决异构设备之间的运动学差异,保证数据的一致性和准确性。这样,用户可以使用任意的遥操作设备控制任意的机器人,从而方便地采集高质量的演示数据。
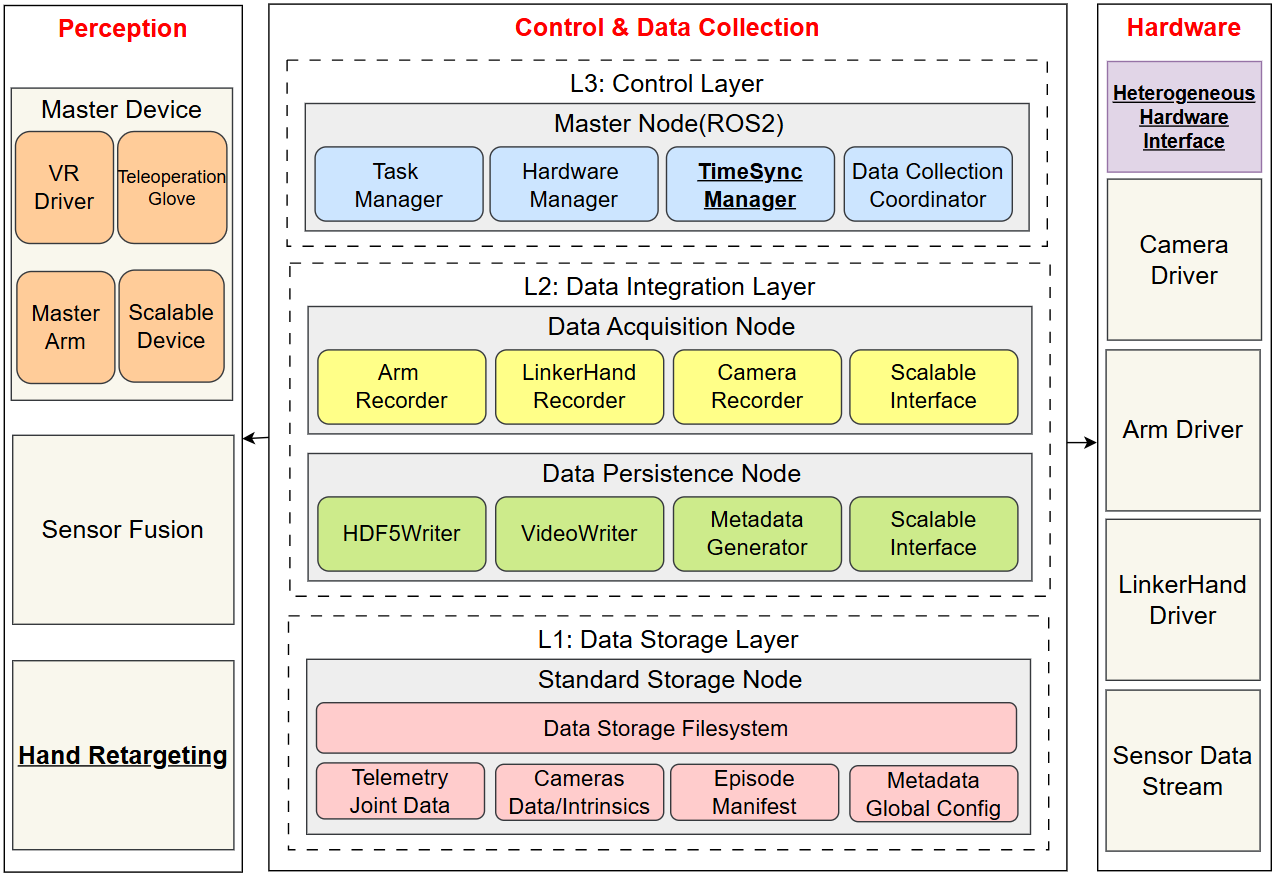
技术框架:Open TeleDex的整体框架包含三个主要模块:输入设备接口、手部姿态重定向模块和机器人控制接口。输入设备接口负责接收来自各种遥操作设备的数据,并将其转换为统一的格式。手部姿态重定向模块根据主从设备的运动学模型,将主手的姿态映射到从手,保证运动的一致性。机器人控制接口将重定向后的姿态转换为机器人控制指令,控制机器人执行相应的动作。
关键创新:Open TeleDex的关键创新在于其硬件无关的设计和手部姿态重定向算法。硬件无关的设计使得系统可以支持各种类型的机器人和输入设备,提高了系统的通用性和可扩展性。手部姿态重定向算法解决了异构设备之间的运动学差异,保证了数据的一致性和准确性,提高了模仿学习的性能。
关键设计:手部姿态重定向算法是Open TeleDex的关键设计。该算法基于运动学模型,将主手的姿态映射到从手。具体来说,算法首先建立主从手的运动学模型,然后根据主手的关节角度计算末端执行器的位姿。接着,算法根据从手的运动学模型,计算出能够实现相同末端执行器位姿的关节角度。为了保证运动的平滑性和自然性,算法还引入了约束条件,例如关节角度范围限制和速度限制。
🖼️ 关键图片

📊 实验亮点
论文提出了Open TeleDex,一个硬件无关的遥操作系统,并设计了手部姿态重定向算法。该系统能够支持多种异构机器人平台,并保证高精度的数据采集。实验结果表明,Open TeleDex能够显著提高模仿学习的性能,并且具有良好的通用性和可扩展性。具体的性能数据和对比基线在论文中进行了详细的展示。
🎯 应用场景
Open TeleDex可广泛应用于机器人模仿学习领域,例如工业自动化、医疗机器人、服务机器人等。通过该系统,用户可以方便地采集高质量的演示数据,训练机器人完成各种复杂的操作任务。该系统还可以用于远程操作和虚拟现实等领域,例如远程医疗、远程维护等。未来,Open TeleDex有望成为机器人操作领域的重要基础设施,推动机器人技术的快速发展。
📄 摘要(原文)
Accurate and high-fidelity demonstration data acquisition is a critical bottleneck for deploying robot Imitation Learning (IL) systems, particularly when dealing with heterogeneous robotic platforms. Existing teleoperation systems often fail to guarantee high-precision data collection across diverse types of teleoperation devices. To address this, we developed Open TeleDex, a unified teleoperation framework engineered for demonstration data collection. Open TeleDex specifically tackles the TripleAny challenge, seamlessly supporting any robotic arm, any dexterous hand, and any external input device. Furthermore, we propose a novel hand pose retargeting algorithm that significantly boosts the interoperability of Open TeleDex, enabling robust and accurate compatibility with an even wider spectrum of heterogeneous master and slave equipment. Open TeleDex establishes a foundational, high-quality, and publicly available platform for accelerating both academic research and industry development in complex robotic manipulation and IL.