A Generalized Placeability Metric for Model-Free Unified Pick-and-Place Reasoning
作者: Benno Wingender, Nils Dengler, Rohit Menon, Sicong Pan, Maren Bennewitz
分类: cs.RO
发布日期: 2025-10-16
💡 一句话要点
提出一种广义可放置性度量,用于无模型统一抓取放置推理
🎯 匹配领域: 支柱四:生成式动作 (Generative Motion)
关键词: 抓取放置 机器人 无模型 点云 稳定性 可放置性 统一推理
📋 核心要点
- 现有抓取放置方法依赖物体先验或平面支撑假设,泛化性受限,难以统一推理抓取和放置。
- 提出一种广义可放置性度量,直接从点云评估放置姿势,无需形状先验,联合评估稳定性、可抓取性和间隙。
- 实验表明,该度量在预测稳定性损失方面与CAD相当,且比学习方法产生更符合物理规律的放置。
📝 摘要(中文)
在真实世界的感知噪声下,可靠地抓取和放置未知物体仍然是一个具有挑战性的任务,因为现有方法依赖于强的物体先验(例如,CAD模型)或平面支撑假设,限制了抓取和放置之间泛化和统一推理。本文提出了一种广义可放置性度量,该度量直接从嘈杂的点云中评估放置姿势,而无需任何形状先验。该度量联合评估稳定性、可抓取性和间隙。从原始几何体中,我们提取物体的支撑表面,以生成用于多方向放置的各种候选对象,并采样满足碰撞和稳定性约束的接触点。通过将抓取分数建立在每个候选放置的基础上,我们提出的方法能够实现无模型的统一抓取放置推理,并选择能够实现稳定、无碰撞放置的抓取-放置对。在未见过的真实物体和非平面物体支撑上,我们的度量在预测稳定性损失方面提供了与CAD相当的精度,并且通常比基于学习的预测器产生更符合物理规律的放置。
🔬 方法详解
问题定义:现有抓取放置方法通常依赖于物体的CAD模型或假设物体放置在平面上,这限制了它们在真实世界场景中的泛化能力,尤其是在处理未知物体和非平面支撑表面时。此外,现有的方法通常将抓取和放置视为独立的步骤,缺乏统一的推理框架,导致次优的抓取-放置组合。
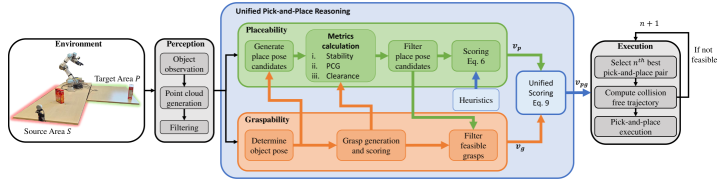
核心思路:本文的核心思路是提出一种无模型的广义可放置性度量,该度量直接从物体的点云数据中评估放置姿势的质量,而无需任何形状先验知识。通过联合考虑稳定性、可抓取性和间隙,该度量能够选择既稳定又易于抓取的放置姿势,从而实现统一的抓取放置推理。
技术框架:该方法首先从原始几何体(点云)中提取物体的支撑表面,然后基于这些支撑表面生成多个候选放置姿势。对于每个候选放置姿势,该方法采样满足碰撞和稳定性约束的接触点。然后,基于这些接触点,该方法计算一个综合的可放置性分数,该分数考虑了放置的稳定性、物体在该姿势下的可抓取性以及与周围环境的间隙。最后,该方法选择具有最高可放置性分数的抓取-放置对。
关键创新:该方法最重要的创新点在于其无模型的特性。与依赖于物体CAD模型的方法不同,该方法直接从点云数据中评估放置姿势,从而使其能够处理未知物体和复杂的环境。此外,该方法通过联合考虑稳定性、可抓取性和间隙,实现了一种统一的抓取放置推理框架,从而能够选择最优的抓取-放置组合。
关键设计:该方法的关键设计包括:1) 使用点云数据提取支撑表面;2) 基于支撑表面生成多个候选放置姿势;3) 采样满足碰撞和稳定性约束的接触点;4) 定义一个综合的可放置性分数,该分数考虑了放置的稳定性、物体在该姿势下的可抓取性以及与周围环境的间隙。可放置性分数的具体计算方式(例如,各个因素的权重)以及稳定性约束的具体形式(例如,力矩平衡)是需要仔细设计的关键参数。
🖼️ 关键图片


📊 实验亮点
该方法在未见过的真实物体和非平面物体支撑上进行了实验。实验结果表明,该方法在预测稳定性损失方面提供了与CAD模型相当的精度,并且通常比基于学习的预测器产生更符合物理规律的放置。具体来说,该方法能够准确地预测物体在不同放置姿势下的稳定性,并选择能够实现稳定放置的抓取-放置对。
🎯 应用场景
该研究成果可应用于机器人自动化、智能制造、物流仓储等领域。例如,在电商仓库中,机器人可以利用该方法自动抓取和放置各种形状和大小的商品,提高分拣效率。在智能制造中,机器人可以利用该方法精确地放置零部件,完成装配任务。此外,该方法还可以应用于家庭服务机器人,帮助人们整理物品。
📄 摘要(原文)
To reliably pick and place unknown objects under real-world sensing noise remains a challenging task, as existing methods rely on strong object priors (e.g., CAD models), or planar-support assumptions, limiting generalization and unified reasoning between grasping and placing. In this work, we introduce a generalized placeability metric that evaluates placement poses directly from noisy point clouds, without any shape priors. The metric jointly scores stability, graspability, and clearance. From raw geometry, we extract the support surfaces of the object to generate diverse candidates for multi-orientation placement and sample contacts that satisfy collision and stability constraints. By conditioning grasp scores on each candidate placement, our proposed method enables model-free unified pick-and-place reasoning and selects grasp-place pairs that lead to stable, collision-free placements. On unseen real objects and non-planar object supports, our metric delivers CAD-comparable accuracy in predicting stability loss and generally produces more physically plausible placements than learning-based predictors.