Stability Criteria and Motor Performance in Delayed Haptic Dyadic Interactions Mediated by Robots
作者: Mingtian Du, Suhas Raghavendra Kulkarni, Simone Kager, Domenico Campolo
分类: cs.RO, eess.SY
发布日期: 2025-10-16 (更新: 2025-10-26)
💡 一句话要点
针对时延触觉人机交互,提出机器人调解下的稳定性判据
🎯 匹配领域: 支柱五:交互与反应 (Interaction & Reaction)
关键词: 人机交互 触觉反馈 机器人控制 时延补偿 稳定性分析
📋 核心要点
- 现有机器人调解的人机交互系统易受网络时延影响,导致系统不稳定和性能下降,缺乏有效的稳定性分析方法。
- 论文提出基于频域分析的稳定性判据,区分时延无关和时延相关的稳定性条件,为系统设计提供理论指导。
- 实验验证了稳定性判据的有效性,并揭示了系统参数(如刚度)与最大可容忍时延之间的非线性关系。
📝 摘要(中文)
本文针对机器人调解的人-人(二元)交互系统,建立了分析稳定性判据,重点关注网络引入时延下的触觉通信。通过频域分析和数值模拟,我们确定了与时延无关和与时延相关的稳定性判据。与时延无关的判据保证了系统在任何时延下都稳定,而与时延相关的判据则定义了发生不稳定性之前的最大可容忍时延。这些判据表明,系统的稳定性取决于控制器和机器人的动态参数,其中刚度的增加会以非线性的方式降低最大可容忍时延,从而增加系统的脆弱性。所提出的判据可以推广到广泛的机器人调解交互中,并为稳定的远程二元系统提供设计指导。使用机器人执行类人运动的实验进一步说明了稳定性和运动性能之间的相关性。本文的研究结果为有效的时延补偿策略提出了先决条件。
🔬 方法详解
问题定义:论文旨在解决机器人调解的人-人触觉交互系统中,由于网络时延引起的系统稳定性问题。现有方法缺乏对时延影响的精确建模和分析,难以保证系统的稳定性和性能,尤其是在高刚度控制下,系统对时延更加敏感。
核心思路:论文的核心思路是通过频域分析方法,建立系统的传递函数模型,并基于Nyquist稳定性判据,推导出与时延无关和与时延相关的稳定性判据。通过分析这些判据,可以确定系统在不同参数配置下的稳定性裕度,并为控制器设计提供指导。
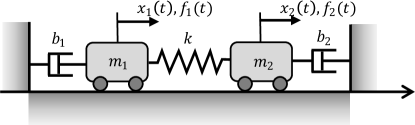
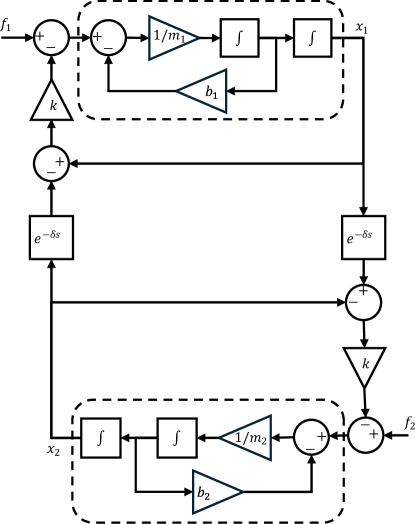
技术框架:论文的技术框架主要包括以下几个步骤:1) 建立机器人调解的人-人交互系统的动力学模型,考虑机器人、控制器和网络时延的影响;2) 将动力学模型转换为频域传递函数模型;3) 基于Nyquist稳定性判据,推导出与时延无关和与时延相关的稳定性判据;4) 通过数值模拟验证所提出的稳定性判据的有效性;5) 通过机器人实验,验证稳定性与运动性能之间的相关性。
关键创新:论文的关键创新在于提出了区分时延无关和时延相关的稳定性判据。时延无关判据保证了系统在任何时延下都稳定,而时延相关判据则给出了最大可容忍时延的上限。这种区分使得系统设计者可以根据实际应用场景选择合适的控制器参数,以保证系统的稳定性和性能。此外,论文还揭示了系统参数(如刚度)与最大可容忍时延之间的非线性关系,为控制器参数的优化提供了理论依据。
关键设计:论文的关键设计包括:1) 采用频域分析方法,将复杂的时域动力学模型转换为易于分析的传递函数模型;2) 基于Nyquist稳定性判据,推导出简洁明了的稳定性判据;3) 通过数值模拟和机器人实验,验证了所提出的稳定性判据的有效性;4) 分析了系统参数(如刚度)与最大可容忍时延之间的关系,为控制器参数的优化提供了指导。
🖼️ 关键图片

📊 实验亮点
论文通过数值模拟和机器人实验验证了所提出的稳定性判据的有效性。实验结果表明,增加控制器刚度会降低最大可容忍时延,从而增加系统的脆弱性。此外,实验还验证了稳定性与运动性能之间的相关性,即在稳定的系统下,机器人可以更好地执行类人运动。这些实验结果为实际应用中的系统设计提供了重要的参考依据。
🎯 应用场景
该研究成果可应用于远程医疗、远程协作、虚拟现实等领域,提高人机交互系统的稳定性和性能。例如,在远程手术中,医生可以通过机器人进行远程操作,而该研究可以帮助设计稳定的控制系统,保证手术的精确性和安全性。此外,该研究还可以应用于康复机器人领域,帮助患者进行康复训练,提高康复效果。
📄 摘要(原文)
This paper establishes analytical stability criteria for robot-mediated human-human (dyadic) interaction systems, focusing on haptic communication under network-induced time delays. Through frequency-domain analysis supported by numerical simulations, we identify both delay-independent and delay-dependent stability criteria. The delay-independent criterion guarantees stability irrespective of the delay, whereas the delay-dependent criterion is characterised by a maximum tolerable delay before instability occurs. The criteria demonstrate dependence on controller and robot dynamic parameters, where increasing stiffness reduces the maximum tolerable delay in a non-linear manner, thereby heightening system vulnerability. The proposed criteria can be generalised to a wide range of robot-mediated interactions and serve as design guidelines for stable remote dyadic systems. Experiments with robots performing human-like movements further illustrate the correlation between stability and motor performance. The findings of this paper suggest the prerequisites for effective delay-compensation strategies.