Restoring Noisy Demonstration for Imitation Learning With Diffusion Models
作者: Shang-Fu Chen, Co Yong, Shao-Hua Sun
分类: cs.RO
发布日期: 2025-10-16
备注: Published in IEEE Transactions on Neural Networks and Learning Systems (TNNLS)
期刊: IEEE Transactions on Neural Networks and Learning Systems (TNNLS), pp. 1-13, Sept. 2025
DOI: 10.1109/TNNLS.2025.3607111.
💡 一句话要点
提出基于扩散模型的模仿学习框架,恢复噪声演示数据以提升策略学习效果
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 模仿学习 扩散模型 噪声数据 数据恢复 机器人控制
📋 核心要点
- 现有模仿学习方法依赖高质量专家数据,但实际应用中演示数据常含噪声,影响学习效果。
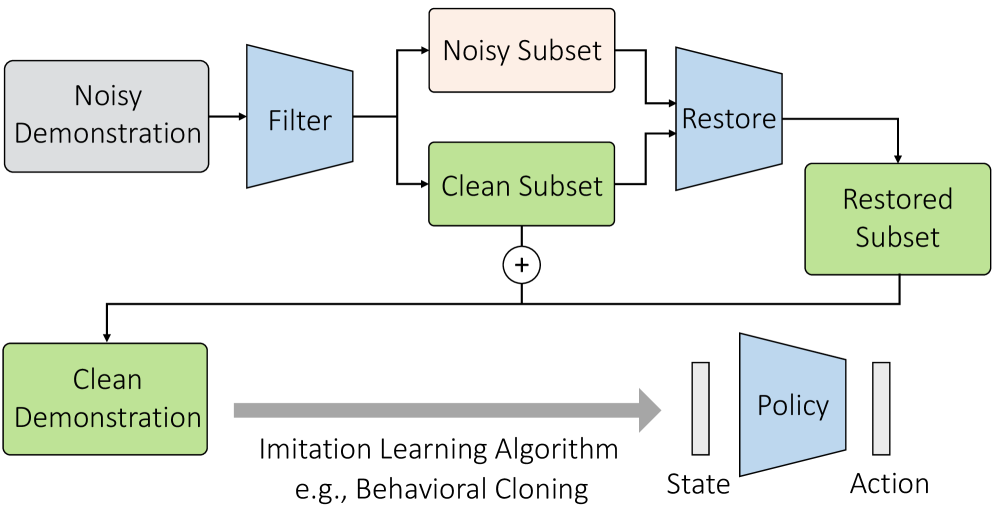
- 论文提出“过滤-恢复”框架,先过滤干净样本,再用条件扩散模型恢复噪声样本。
- 实验表明,该框架在机器人操作、灵巧操作和运动等任务中,性能优于现有方法,且对噪声具有鲁棒性。
📝 摘要(中文)
模仿学习(IL)旨在从专家演示中学习策略,已被广泛应用于各种应用。通过学习专家策略,IL方法不需要环境交互或奖励信号。然而,大多数现有的模仿学习算法都假设完美的专家演示,但专家演示常常包含由人类专家或传感器/控制系统不准确造成的缺陷。为了解决上述问题,本文提出了一种过滤和恢复框架,以最佳地利用具有固有噪声的专家演示。我们提出的方法首先从演示中过滤干净的样本,然后学习条件扩散模型来恢复噪声样本。我们在包括机器人手臂操作、灵巧操作和运动等各种领域评估了我们提出的框架和现有方法。实验结果表明,我们提出的框架在所有任务中始终优于现有方法。消融研究进一步验证了每个组件的有效性,并证明了该框架对不同噪声类型和水平的鲁棒性。这些结果证实了我们的框架对噪声离线演示数据的实际适用性。
🔬 方法详解
问题定义:现有的模仿学习算法通常假设专家演示数据是完美的,然而在实际应用中,由于人为误差、传感器噪声或控制系统的不精确性,专家演示数据往往包含噪声。这些噪声会严重影响模仿学习的性能,导致学习到的策略次优甚至失效。因此,如何有效地利用包含噪声的专家演示数据进行模仿学习是一个重要的挑战。
核心思路:论文的核心思路是首先区分并过滤掉演示数据中质量较高的干净样本,然后利用条件扩散模型来恢复剩余的噪声样本。通过这种方式,可以最大程度地利用专家演示数据,即使其中包含噪声,也能学习到高质量的策略。
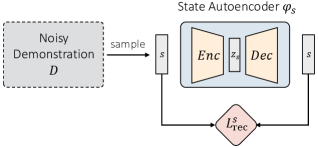
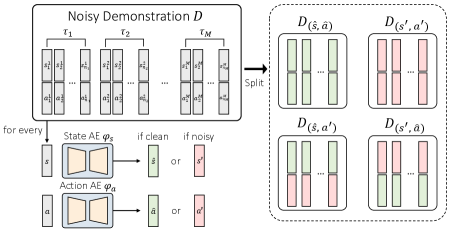
技术框架:该框架主要包含两个阶段:过滤阶段和恢复阶段。在过滤阶段,使用某种判别器(具体实现未知)来区分干净样本和噪声样本,并将干净样本保留。在恢复阶段,利用条件扩散模型,以干净样本为条件,对噪声样本进行恢复,生成高质量的演示数据。最终,使用所有(包括原始干净样本和恢复后的样本)演示数据进行模仿学习。
关键创新:该方法的核心创新在于将扩散模型引入到模仿学习的预处理阶段,用于恢复噪声演示数据。与传统的去噪方法相比,扩散模型具有更强的生成能力,可以生成更逼真的演示数据,从而提高模仿学习的性能。此外,先过滤再恢复的策略,避免了对所有数据进行盲目去噪,提高了效率。
关键设计:论文的关键设计包括:1) 如何设计判别器以准确区分干净样本和噪声样本(具体实现未知);2) 如何构建条件扩散模型,使其能够有效地利用干净样本作为条件进行数据恢复;3) 如何平衡过滤阶段和恢复阶段,以获得最佳的模仿学习性能。具体的损失函数、网络结构和参数设置在论文中应该有详细描述,但摘要中未提及。
🖼️ 关键图片
📊 实验亮点
实验结果表明,该框架在机器人手臂操作、灵巧操作和运动等多个任务中,均显著优于现有模仿学习方法。消融实验验证了过滤和恢复两个阶段的有效性,并证明了该框架对不同类型和程度的噪声具有良好的鲁棒性。具体性能提升幅度未知,需要在论文中查找。
🎯 应用场景
该研究成果可广泛应用于机器人控制、自动驾驶、游戏AI等领域。在这些领域中,获取高质量的专家演示数据往往成本高昂或难以实现。该方法能够有效利用包含噪声的演示数据,降低数据获取成本,提高模仿学习的实用性。未来,该方法有望推动模仿学习在更多实际场景中的应用。
📄 摘要(原文)
Imitation learning (IL) aims to learn a policy from expert demonstrations and has been applied to various applications. By learning from the expert policy, IL methods do not require environmental interactions or reward signals. However, most existing imitation learning algorithms assume perfect expert demonstrations, but expert demonstrations often contain imperfections caused by errors from human experts or sensor/control system inaccuracies. To address the above problems, this work proposes a filter-and-restore framework to best leverage expert demonstrations with inherent noise. Our proposed method first filters clean samples from the demonstrations and then learns conditional diffusion models to recover the noisy ones. We evaluate our proposed framework and existing methods in various domains, including robot arm manipulation, dexterous manipulation, and locomotion. The experiment results show that our proposed framework consistently outperforms existing methods across all the tasks. Ablation studies further validate the effectiveness of each component and demonstrate the framework's robustness to different noise types and levels. These results confirm the practical applicability of our framework to noisy offline demonstration data.