Towards Adaptable Humanoid Control via Adaptive Motion Tracking
作者: Tao Huang, Huayi Wang, Junli Ren, Kangning Yin, Zirui Wang, Xiao Chen, Feiyu Jia, Wentao Zhang, Junfeng Long, Jingbo Wang, Jiangmiao Pang
分类: cs.RO, cs.AI
发布日期: 2025-10-16
备注: 9 pages
🔗 代码/项目: PROJECT_PAGE
💡 一句话要点
AdaMimic:基于自适应运动追踪的通用人形机器人控制方法
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱八:物理动画 (Physics-based Animation)
关键词: 人形机器人控制 运动模仿 自适应控制 运动追踪 强化学习
📋 核心要点
- 现有方法在人形机器人控制中,难以兼顾运动模仿的准确性和对不同环境的适应性,需要大量训练数据或牺牲精度。
- AdaMimic通过稀疏关键帧和轻量编辑增强数据,并训练适配器调整追踪速度和动作,实现单参考运动的自适应控制。
- 实验表明,AdaMimic在模拟和真实机器人上,均能显著提升模仿精度和适应性,适用于多种任务和环境。
📝 摘要(中文)
本文提出了一种名为AdaMimic的新型运动追踪算法,旨在通过单个参考运动实现通用人形机器人的自适应控制。现有方法虽然可以通过少量运动实现良好的适应性,但通常会牺牲模仿精度;而运动追踪方法虽然可以实现精确的模仿,但需要大量的训练运动以及测试时的目标运动才能进行调整。为了结合两者的优势,AdaMimic首先通过将单个参考运动稀疏化为关键帧,并应用轻量级的编辑来创建增强数据集,且尽量减少物理假设。然后,通过追踪这些稀疏的关键帧来初始化策略,以生成密集的中间运动。随后,训练适配器以根据调整来调整追踪速度并细化底层动作,从而实现灵活的时间扭曲,进一步提高模仿精度和适应性。在模拟和真实的Unitree G1人形机器人上的多项任务中,验证了该方法在各种适应条件下的显著改进。
🔬 方法详解
问题定义:现有的人形机器人控制方法,要么依赖大量训练数据以实现精确的运动模仿,要么牺牲模仿精度以获得更好的环境适应性。运动先验方法虽然适应性好,但模仿精度不足;运动追踪方法虽然精度高,但需要大量训练数据和测试时的目标运动。因此,如何在仅使用少量参考运动的情况下,实现高精度和高适应性的人形机器人控制是一个关键问题。
核心思路:AdaMimic的核心思路是结合运动先验和运动追踪的优势,通过单个参考运动学习到具有良好泛化能力的控制策略。具体来说,首先对参考运动进行稀疏化和增强,然后利用稀疏关键帧初始化策略,最后通过训练适配器来调整追踪速度和优化动作,从而实现对不同环境的自适应。
技术框架:AdaMimic的整体框架包含以下几个主要阶段:1) 数据增强:将单个参考运动稀疏化为关键帧,并进行轻量级的编辑,生成增强数据集。2) 策略初始化:通过追踪稀疏的关键帧,生成密集的中间运动,初始化控制策略。3) 适配器训练:训练适配器,根据环境调整追踪速度和优化底层动作,实现时间扭曲和动作优化。
关键创新:AdaMimic的关键创新在于:1) 数据增强策略:通过稀疏化和轻量编辑,从单个参考运动生成多样化的训练数据,降低了对大量数据的依赖。2) 自适应控制框架:通过训练适配器,实现对追踪速度和底层动作的自适应调整,提高了对不同环境的适应性。3) 时间扭曲机制:通过调整追踪速度,实现灵活的时间扭曲,进一步提高了模仿精度和适应性。
关键设计:在数据增强阶段,关键帧的选择和编辑策略至关重要,需要保证关键帧能够捕捉到运动的主要特征,并且编辑后的运动仍然具有物理可行性。在适配器训练阶段,损失函数的设计需要平衡模仿精度和动作平滑性。适配器的网络结构需要足够灵活,以便能够学习到复杂的自适应策略。具体参数设置未知。
🖼️ 关键图片


📊 实验亮点
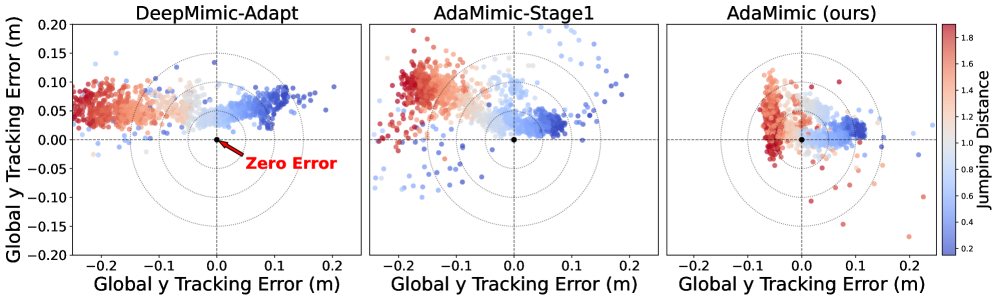
AdaMimic在模拟和真实Unitree G1人形机器人上进行了验证。实验结果表明,该方法能够显著提高运动模仿的精度和适应性。在多种任务和适应条件下,AdaMimic均表现出优于现有方法的性能。具体性能数据未知,但论文强调了在多种适应条件下的显著改进。
🎯 应用场景
AdaMimic技术可应用于各种人形机器人控制场景,例如:复杂地形行走、人机协作、运动康复等。该方法降低了对大量训练数据的依赖,使得人形机器人能够更快地适应新的任务和环境,具有重要的实际应用价值。未来,该技术有望推动人形机器人在家庭服务、医疗护理、工业生产等领域的广泛应用。
📄 摘要(原文)
Humanoid robots are envisioned to adapt demonstrated motions to diverse real-world conditions while accurately preserving motion patterns. Existing motion prior approaches enable well adaptability with a few motions but often sacrifice imitation accuracy, whereas motion-tracking methods achieve accurate imitation yet require many training motions and a test-time target motion to adapt. To combine their strengths, we introduce AdaMimic, a novel motion tracking algorithm that enables adaptable humanoid control from a single reference motion. To reduce data dependence while ensuring adaptability, our method first creates an augmented dataset by sparsifying the single reference motion into keyframes and applying light editing with minimal physical assumptions. A policy is then initialized by tracking these sparse keyframes to generate dense intermediate motions, and adapters are subsequently trained to adjust tracking speed and refine low-level actions based on the adjustment, enabling flexible time warping that further improves imitation accuracy and adaptability. We validate these significant improvements in our approach in both simulation and the real-world Unitree G1 humanoid robot in multiple tasks across a wide range of adaptation conditions. Videos and code are available at https://taohuang13.github.io/adamimic.github.io/.