Development of an Intuitive GUI for Non-Expert Teleoperation of Humanoid Robots
作者: Austin Barret, Meng Cheng Lau
分类: cs.RO
发布日期: 2025-10-15
备注: 9 Figure. Presented at FIRA Summit 2025, Daegu, S. Korea
💡 一句话要点
为人形机器人非专业遥操作设计直观图形用户界面
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 人形机器人 遥操作 图形用户界面 人机交互 用户界面设计
📋 核心要点
- 现有的人形机器人遥操作系统在非专业用户界面设计方面投入不足,导致操作复杂性高。
- 本研究旨在开发一个简单直观且可扩展的GUI,使非专业人员能够轻松遥控人形机器人。
- 通过借鉴UI和HRI领域的实践经验,设计新的界面,目标是实现非专业人员的有效遥操作。
📝 摘要(中文)
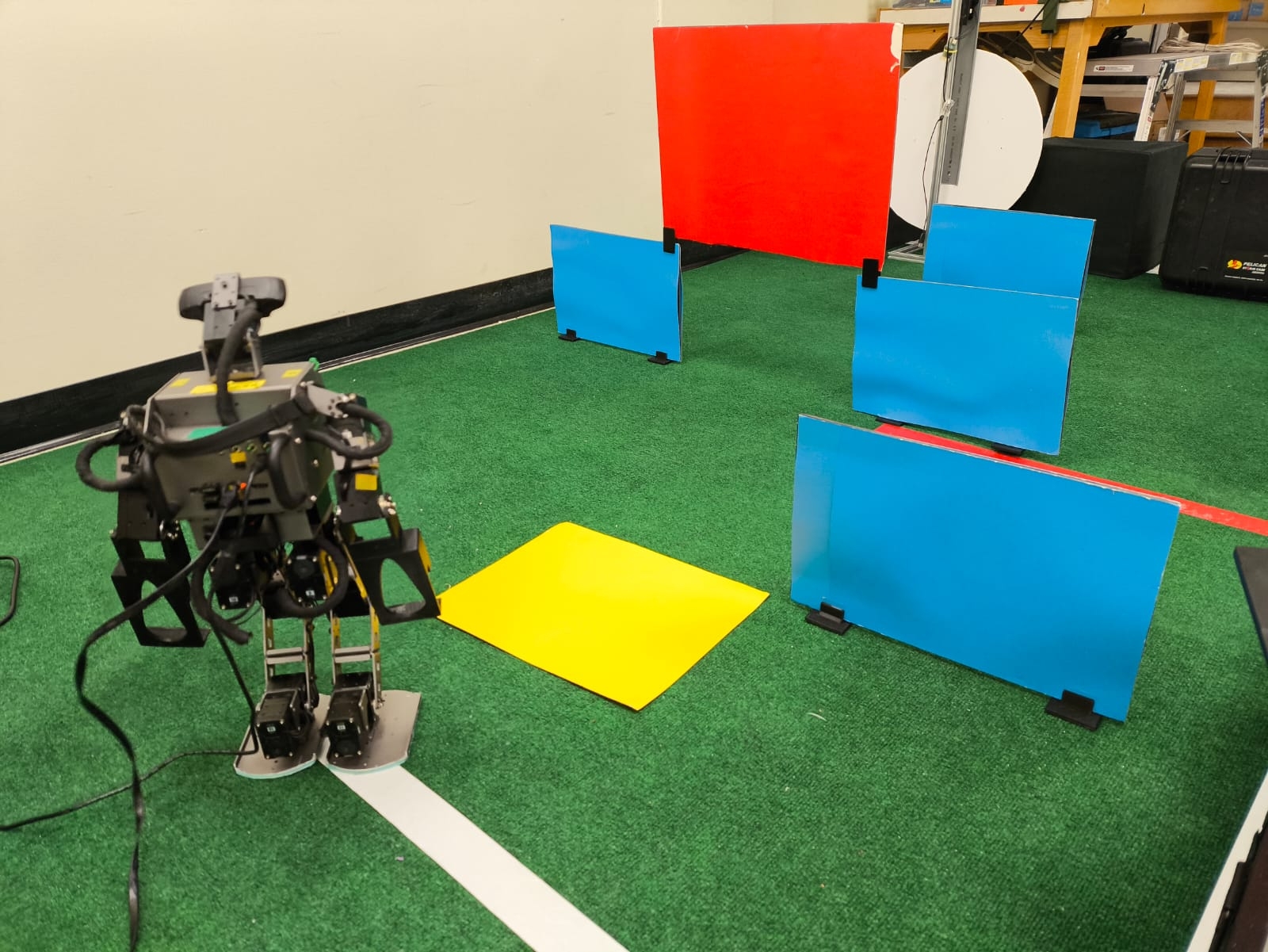
人形机器人的操作是一个重要的研究领域,具有许多实际和竞争性的应用。然而,许多此类系统并未大力投入开发以非专业人员为中心的图形用户界面(GUI)以进行操作。本研究的重点是开发一个可扩展的GUI,该GUI被定制为简单直观,以便非专业操作员可以通过FIRA监管的障碍赛道控制机器人。通过使用用户界面开发(UI)中的常用实践,并理解人机交互(HRI)和其他相关概念中描述的概念,我们将开发一种新的界面,目标是构建一个非专业人员遥操作系统。
🔬 方法详解
问题定义:现有的人形机器人遥操作界面通常复杂且难以使用,特别是对于没有专业知识的操作员。这限制了人形机器人在更广泛场景中的应用,例如在非结构化环境中执行任务。现有方法的痛点在于用户学习曲线陡峭,操作效率低,且容易出错。
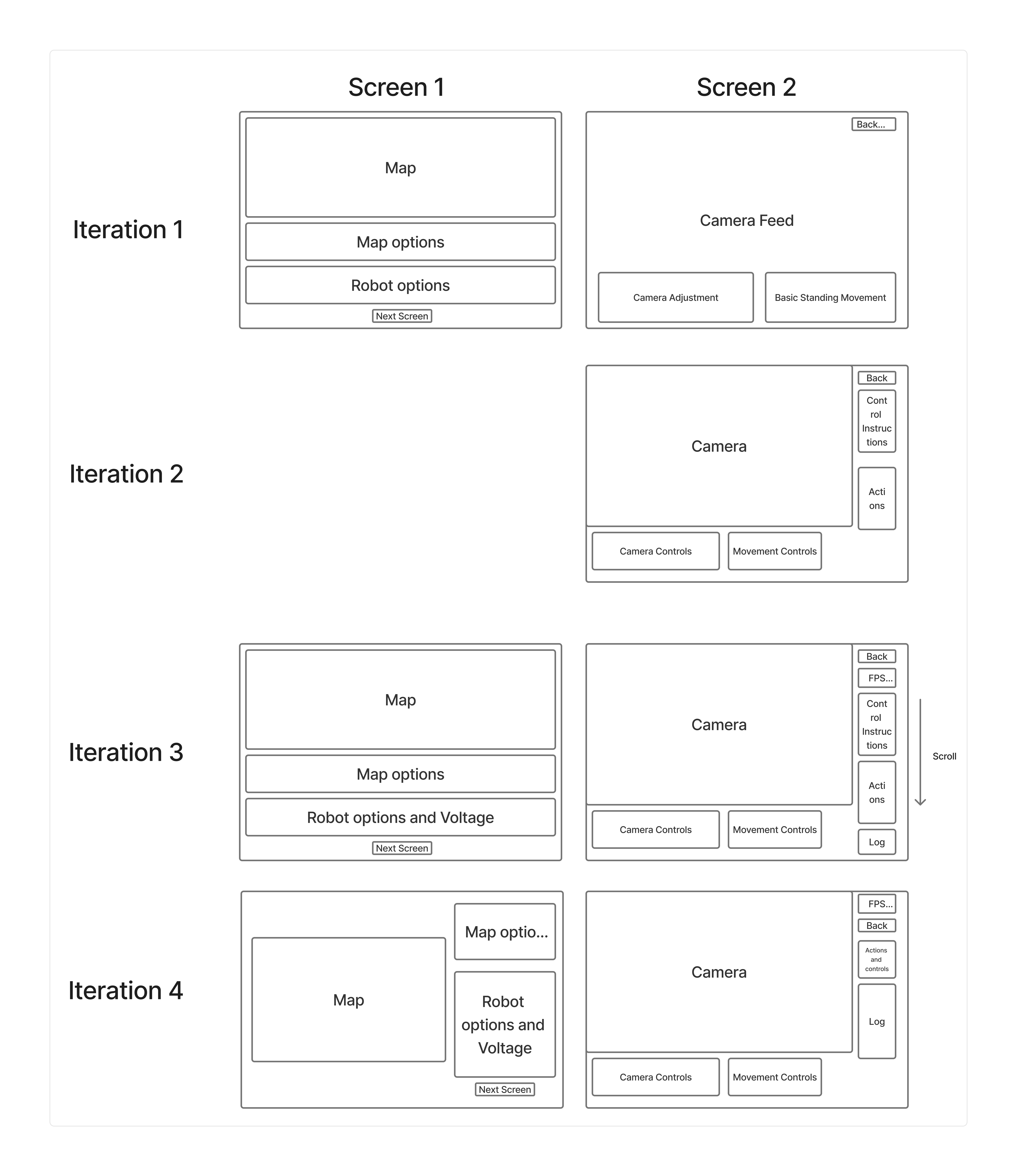
核心思路:本研究的核心思路是采用以用户为中心的设计方法,开发一个简单、直观且易于理解的图形用户界面(GUI)。通过借鉴用户界面开发(UI)和人机交互(HRI)领域的最佳实践,降低操作难度,提高操作效率,使非专业人员也能轻松控制人形机器人。
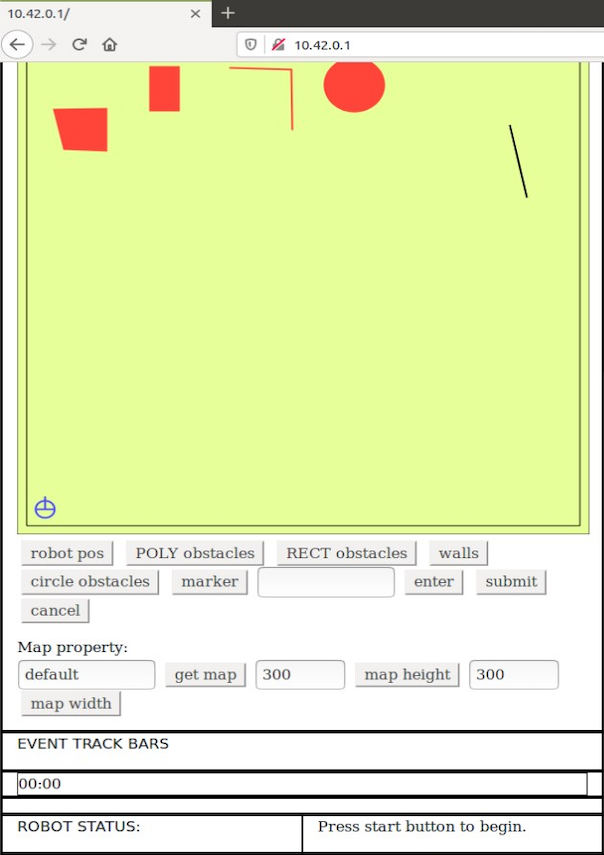
技术框架:该研究的技术框架主要包括以下几个阶段:1. 需求分析:了解非专业操作员的需求和痛点。2. 界面设计:基于需求分析,设计简单直观的GUI。3. 界面开发:使用合适的编程语言和工具实现GUI。4. 用户测试:邀请非专业操作员进行测试,收集反馈并改进GUI。5. 迭代优化:根据用户反馈,不断迭代优化GUI,提高用户体验。
关键创新:本研究的关键创新在于将用户界面设计原则和人机交互理论应用于人形机器人遥操作GUI的开发,从而显著降低了操作难度,提高了操作效率。与现有方法相比,该GUI更加注重用户的易用性和可理解性,使得非专业人员也能快速上手并有效控制人形机器人。
关键设计:具体的技术细节未知,摘要中未提及。但可以推测,关键设计可能包括:1. 采用简洁明了的视觉元素和交互方式。2. 提供实时反馈和错误提示。3. 支持多种操作模式,例如直接控制和任务导向控制。4. 允许用户自定义界面布局和操作方式。
🖼️ 关键图片
📊 实验亮点
摘要中未提供具体的实验结果或性能数据。未来的研究可以重点关注非专业用户使用该GUI完成特定任务的成功率、操作时间、错误率等指标,并与现有GUI进行对比,以验证该GUI的有效性和优越性。
🎯 应用场景
该研究成果可应用于各种需要人形机器人遥操作的场景,例如:灾难救援、远程医疗、教育娱乐等。通过降低操作门槛,可以使更多的人参与到人形机器人的应用中,从而提高工作效率,改善生活质量,并推动人形机器人技术的进一步发展。
📄 摘要(原文)
The operation of humanoid robotics is an essential field of research with many practical and competitive applications. Many of these systems, however, do not invest heavily in developing a non-expert-centered graphical user interface (GUI) for operation. The focus of this research is to develop a scalable GUI that is tailored to be simple and intuitive so non-expert operators can control the robot through a FIRA-regulated obstacle course. Using common practices from user interface development (UI) and understanding concepts described in human-robot interaction (HRI) and other related concepts, we will develop a new interface with the goal of a non-expert teleoperation system.