ALOHA2 Robot Kitchen Application Scenario Reproduction Report
作者: Haoyang Wu, Siheng Wu, William X. Liu, Fangui Zeng
分类: cs.RO
发布日期: 2025-10-15
💡 一句话要点
ALOHA2:双臂遥操作机器人厨房应用场景复现平台
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 双臂机器人 遥操作 机器人厨房 人机交互 机器人平台
📋 核心要点
- 现有遥操作机器人存在性能和鲁棒性不足的问题,限制了其在复杂环境中的应用。
- ALOHA2通过优化机械臂设计和控制方式,提升了机器人的性能、鲁棒性和人机交互体验。
- ALOHA2平台配备多视角摄像头和铝制框架,为厨房应用场景的数据采集和算法验证提供了基础。
📝 摘要(中文)
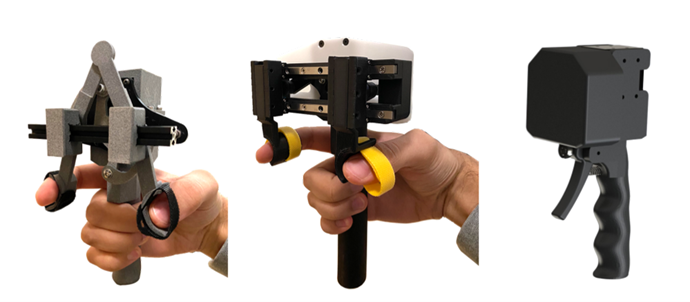
ALOHA2是双臂遥操作机器人ALOHA的增强版本,与原始设计相比,它具有更高的性能和鲁棒性,并且更符合人体工程学。与ALOHA一样,ALOHA2由两个夹爪和两个ViperX 6自由度机械臂,以及两个较小的WidowX机械臂组成。用户通过反向驱动操作主机械臂来控制从动机械臂。该设备还包括摄像头,可生成来自多个视角的图像,从而可以在遥操作期间收集RGB数据。该机器人安装在48英寸x 30英寸的桌子上,配备铝制框架,该框架为摄像头和重力补偿系统提供了额外的安装点。
🔬 方法详解
问题定义:现有遥操作机器人在复杂环境下的应用受限于其性能和鲁棒性。例如,在厨房环境中,需要机器人能够精确、稳定地完成各种操作,如抓取、放置、切割等。原始ALOHA机器人在这些任务中可能表现出精度不足、易受干扰等问题。
核心思路:ALOHA2的核心思路是通过改进机械臂的设计和控制方式,提高机器人的性能和鲁棒性。具体来说,采用了更高性能的ViperX 6自由度机械臂,并优化了人机交互界面,使得操作更加符合人体工程学。
技术框架:ALOHA2平台由以下几个主要模块组成:1) 主从机械臂系统:用户通过操作主机械臂来控制从动机械臂;2) 多视角摄像头系统:用于采集RGB数据,为视觉算法提供输入;3) 铝制框架:为摄像头和重力补偿系统提供安装点,保证系统的稳定性和可扩展性。整个系统构成一个完整的遥操作平台。
关键创新:ALOHA2的关键创新在于其增强的硬件性能和更符合人体工程学的设计。相比于原始ALOHA,ALOHA2采用了更高性能的机械臂,提高了操作精度和速度。同时,优化了人机交互界面,使得操作更加自然和舒适。
关键设计:ALOHA2的关键设计包括:1) 采用ViperX 6自由度机械臂,提供更大的工作空间和更高的精度;2) 配备多视角摄像头,提供更全面的视觉信息;3) 设计铝制框架,为系统提供稳定的支撑和可扩展性;4) 优化人机交互界面,降低操作难度和疲劳感。
🖼️ 关键图片


📊 实验亮点
由于该报告为应用场景复现报告,而非算法或系统性能评估,因此没有提供具体的性能数据或对比基线。其亮点在于构建了一个增强型的双臂遥操作机器人平台,并将其应用于厨房场景,为后续的研究和应用奠定了基础。ALOHA2在硬件性能和人机交互方面进行了优化,预期能够提升遥操作的效率和精度。
🎯 应用场景
ALOHA2平台可应用于各种需要远程操作的场景,例如:危险环境下的作业、医疗手术辅助、以及厨房自动化等。通过遥操作,人类可以安全地控制机器人完成复杂任务,从而提高工作效率和安全性。未来,ALOHA2有望成为家庭服务机器人和工业自动化的重要组成部分。
📄 摘要(原文)
ALOHA2 is an enhanced version of the dual-arm teleoperated robot ALOHA, featuring higher performance and robustness compared to the original design, while also being more ergonomic. Like ALOHA, ALOHA2 consists of two grippers and two ViperX 6-DoF arms, as well as two smaller WidowX arms. Users control the follower mechanical arms by operating the leader mechanical arms through back-driving. The device also includes cameras that generate images from multiple viewpoints, allowing for RGB data collection during teleoperation. The robot is mounted on a 48-inch x 30-inch table, equipped with an aluminum frame that provides additional mounting points for cameras and gravity compensation systems.