HYPE: Hybrid Planning with Ego Proposal-Conditioned Predictions
作者: Hang Yu, Julian Jordan, Julian Schmidt, Silvan Lindner, Alessandro Canevaro, Wilhelm Stork
分类: cs.RO, cs.AI, cs.LG
发布日期: 2025-10-14 (更新: 2025-10-23)
备注: Accepted to IEEE ITSC 2025
💡 一句话要点
HYPE:基于自车提议条件预测的混合规划,提升城市环境运动规划安全性
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 运动规划 蒙特卡洛树搜索 轨迹预测 自动驾驶 多智能体交互
📋 核心要点
- 现有运动规划方法依赖复杂成本函数来优化轨迹,难以应对复杂城市环境和多智能体交互。
- HYPE提出混合规划方法,结合学习的轨迹提议模型和蒙特卡洛树搜索,简化成本函数设计。
- 在nuPlan和DeepUrban数据集上,HYPE在安全性和适应性方面表现出最先进的性能。
📝 摘要(中文)
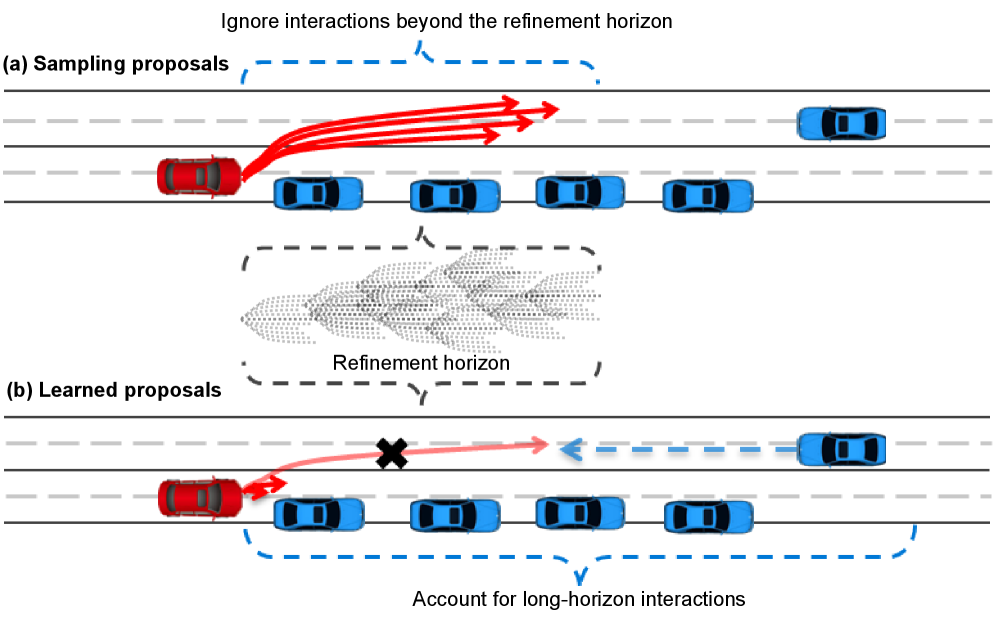
在复杂的城市环境中,安全且可解释的运动规划需要考虑双向多智能体交互。这种推理需要估计潜在的自车驾驶操作的成本。许多现有的规划器使用基于采样的方法生成初始轨迹,并通过优化学习到的未来环境状态预测来改进它们,这需要一个编码期望车辆行为的成本函数。设计这样的成本函数可能非常具有挑战性,尤其是在必须考虑各种复杂的城市场景时。我们提出了HYPE:基于自车提议条件预测的混合规划,该规划器将来自学习到的提议模型的多模态轨迹提议作为启发式先验集成到蒙特卡洛树搜索(MCTS)改进中。为了建模双向交互,我们引入了一个自车条件占用预测模型,从而实现一致的、场景感知的推理。我们的设计通过考虑提议驱动的指导,显著简化了改进中的成本函数设计,仅需要最小化的基于网格的成本项。在大型真实世界基准nuPlan和DeepUrban上的评估表明,HYPE有效地实现了最先进的性能,尤其是在安全性和适应性方面。
🔬 方法详解
问题定义:现有运动规划方法在复杂城市环境中面临挑战,尤其是在处理多智能体交互时。这些方法通常依赖于采样生成初始轨迹,然后通过优化学习到的环境预测来改进轨迹。然而,设计一个能够准确反映期望车辆行为的成本函数非常困难,尤其是在需要考虑各种复杂场景时。现有方法在安全性和适应性方面存在不足。
核心思路:HYPE的核心思路是将学习到的轨迹提议模型作为启发式先验知识融入到蒙特卡洛树搜索(MCTS)中。通过利用提议模型生成的多模态轨迹,HYPE可以更有效地探索搜索空间,并简化成本函数的设计。此外,HYPE引入了自车条件占用预测模型,以建模双向交互,从而实现更一致和场景感知的推理。
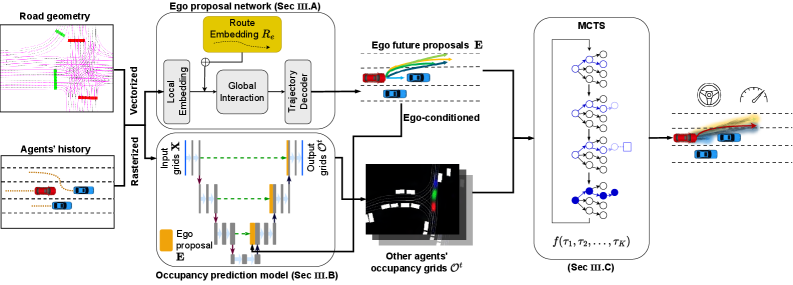
技术框架:HYPE的整体框架包括以下几个主要模块:1) 轨迹提议模型:该模型学习生成多模态的轨迹提议,作为MCTS的先验知识。2) 自车条件占用预测模型:该模型预测在给定自车行为的情况下,周围环境的未来状态,用于评估轨迹的安全性。3) 蒙特卡洛树搜索(MCTS):MCTS利用轨迹提议模型和自车条件占用预测模型,迭代地搜索和优化轨迹。4) 成本函数:HYPE使用一个简化的基于网格的成本函数,主要用于评估轨迹的安全性和可行性。
关键创新:HYPE的关键创新在于将学习到的轨迹提议模型与蒙特卡洛树搜索相结合,从而简化了成本函数的设计,并提高了规划的效率和安全性。此外,自车条件占用预测模型的引入使得HYPE能够更好地建模双向交互,从而实现更鲁棒的运动规划。与现有方法相比,HYPE不需要复杂的成本函数,而是依赖于提议模型和MCTS来指导搜索过程。
关键设计:轨迹提议模型使用神经网络进行训练,输入是当前的环境状态,输出是多条可能的轨迹。自车条件占用预测模型也使用神经网络进行训练,输入是当前的环境状态和自车的轨迹,输出是未来一段时间内的占用概率。MCTS使用UCT(Upper Confidence Bound applied to Trees)算法进行搜索,成本函数主要基于网格占用情况,惩罚与障碍物的碰撞。具体的参数设置,如神经网络的结构、学习率、MCTS的探索参数等,需要在实际应用中进行调整。
🖼️ 关键图片

📊 实验亮点
HYPE在nuPlan和DeepUrban两个大规模真实世界数据集上进行了评估,结果表明HYPE在安全性和适应性方面均优于现有方法。具体而言,HYPE在碰撞率方面显著降低,同时能够更好地适应不同的交通场景。实验结果证明了HYPE在复杂城市环境中的有效性和优越性。
🎯 应用场景
HYPE可应用于自动驾驶、高级驾驶辅助系统(ADAS)等领域,尤其是在复杂的城市交通环境中。通过提高运动规划的安全性和适应性,HYPE能够减少交通事故的发生,并提高交通效率。未来,HYPE可以进一步扩展到更复杂的场景,如无人配送、智能交通管理等。
📄 摘要(原文)
Safe and interpretable motion planning in complex urban environments needs to reason about bidirectional multi-agent interactions. This reasoning requires to estimate the costs of potential ego driving maneuvers. Many existing planners generate initial trajectories with sampling-based methods and refine them by optimizing on learned predictions of future environment states, which requires a cost function that encodes the desired vehicle behavior. Designing such a cost function can be very challenging, especially if a wide range of complex urban scenarios has to be considered. We propose HYPE: HYbrid Planning with Ego proposal-conditioned predictions, a planner that integrates multimodal trajectory proposals from a learned proposal model as heuristic priors into a Monte Carlo Tree Search (MCTS) refinement. To model bidirectional interactions, we introduce an ego-conditioned occupancy prediction model, enabling consistent, scene-aware reasoning. Our design significantly simplifies cost function design in refinement by considering proposal-driven guidance, requiring only minimalistic grid-based cost terms. Evaluations on large-scale real-world benchmarks nuPlan and DeepUrban show that HYPE effectively achieves state-of-the-art performance, especially in safety and adaptability.