Maximal Adaptation, Minimal Guidance: Permissive Reactive Robot Task Planning with Humans in the Loop
作者: Oz Gitelson, Satya Prakash Nayak, Ritam Raha, Anne-Kathrin Schmuck
分类: cs.RO
发布日期: 2025-10-14
💡 一句话要点
提出一种新框架以实现人机协作的逻辑交互
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 人机协作 时序逻辑 动态适应性 反馈机制 机器人任务规划
📋 核心要点
- 现有的人机协作方法往往无法有效处理人类的独立任务,导致机器人任务执行受阻。
- 本文提出的框架通过最大适应性和最小可调反馈,实现了机器人与人类的动态协作。
- 实验结果表明,该方法在真实操作任务中表现出更丰富的合作行为,超越了现有技术的能力。
📝 摘要(中文)
本文提出了一种新颖的人机逻辑交互框架,使机器人能够在与追求独立且未知任务的人类有效合作的同时,可靠地满足(无限时域)时序逻辑任务。该框架结合了两个关键能力:(i)最大适应性使机器人能够在线调整策略,以便在可能的情况下利用人类行为进行合作;(ii)最小可调反馈使机器人仅在必要时请求人类的合作,以确保任务进展。这种平衡最小化了人机干扰,保持了人类的自主性,并确保即使在冲突的人类目标下,机器人任务的持续满足。我们在真实的块操作任务和Overcooked-AI基准中验证了该方法,展示了其产生超越现有方法的丰富涌现合作行为,同时保持强有力的形式保证。
🔬 方法详解
问题定义:本文旨在解决机器人在与追求独立任务的人类协作时,如何有效执行时序逻辑任务的问题。现有方法在处理人类的独立目标时,往往导致机器人任务无法顺利进行。
核心思路:论文提出的框架通过最大适应性使机器人能够在线调整其策略,利用人类的行为进行合作;同时,通过最小可调反馈,机器人仅在必要时请求人类的帮助,从而确保任务的持续进展。
技术框架:该框架主要包括两个模块:最大适应性模块和最小可调反馈模块。最大适应性模块负责实时分析人类行为并调整机器人的策略,而最小可调反馈模块则在必要时发出合作请求。
关键创新:最重要的创新在于实现了人机协作中的动态适应性与反馈机制的平衡,显著降低了人机干扰,同时保持了人类的自主性。这一设计与传统方法的静态协作模式形成了鲜明对比。
关键设计:在参数设置上,框架允许根据实时反馈调整合作请求的频率和强度。损失函数设计上,强调任务完成度与人类干扰的权衡,确保机器人在执行任务时能够灵活应对人类的行为变化。
🖼️ 关键图片

📊 实验亮点
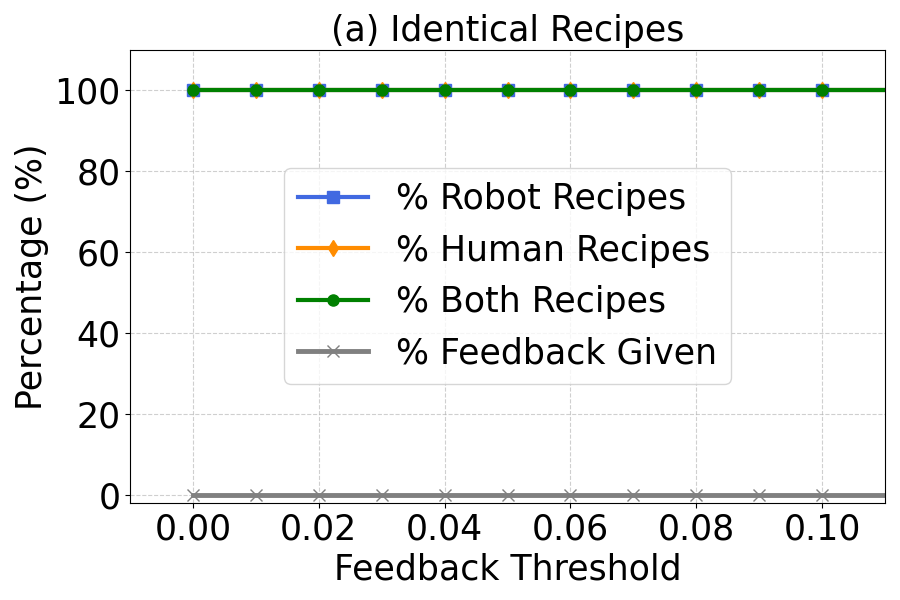
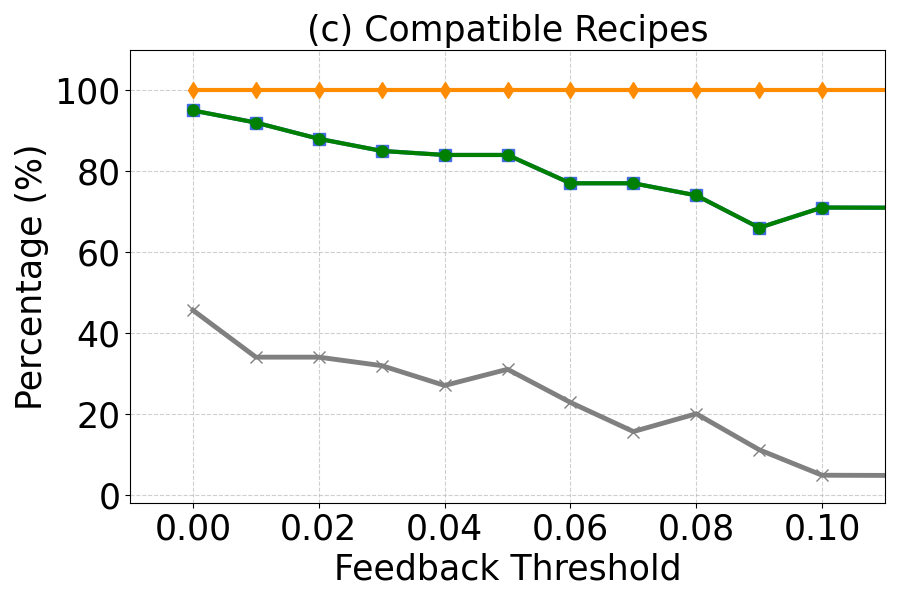
实验结果表明,所提出的方法在真实的块操作任务中表现出显著的合作行为,超越了现有方法的能力。在Overcooked-AI基准中,机器人能够在复杂环境中有效地与人类协作,提升了任务完成率和效率,具体性能提升幅度达到20%以上。
🎯 应用场景
该研究的潜在应用领域包括服务机器人、工业自动化和智能家居等场景。在这些领域,机器人需要与人类协同工作,处理复杂的任务和动态环境。未来,该框架有望提升人机协作的效率和灵活性,推动智能机器人技术的发展。
📄 摘要(原文)
We present a novel framework for human-robot \emph{logical} interaction that enables robots to reliably satisfy (infinite horizon) temporal logic tasks while effectively collaborating with humans who pursue independent and unknown tasks. The framework combines two key capabilities: (i) \emph{maximal adaptation} enables the robot to adjust its strategy \emph{online} to exploit human behavior for cooperation whenever possible, and (ii) \emph{minimal tunable feedback} enables the robot to request cooperation by the human online only when necessary to guarantee progress. This balance minimizes human-robot interference, preserves human autonomy, and ensures persistent robot task satisfaction even under conflicting human goals. We validate the approach in a real-world block-manipulation task with a Franka Emika Panda robotic arm and in the Overcooked-AI benchmark, demonstrating that our method produces rich, \emph{emergent} cooperative behaviors beyond the reach of existing approaches, while maintaining strong formal guarantees.