Automated Behavior Planning for Fruit Tree Pruning via Redundant Robot Manipulators: Addressing the Behavior Planning Challenge
作者: Gaoyuan Liu, Bas Boom, Naftali Slob, Yuri Durodié, Ann Nowé, Bram Vanderborght
分类: cs.RO
发布日期: 2025-10-14
💡 一句话要点
提出基于冗余机械臂的果树修剪自动行为规划方法,解决复杂环境下的规划难题。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 机器人修剪 行为规划 冗余机械臂 农业机器人 路径规划 碰撞避免 环境建模
📋 核心要点
- 现有机器人修剪研究主要关注感知,忽略了在复杂环境下机械臂操作的规划与控制难题。
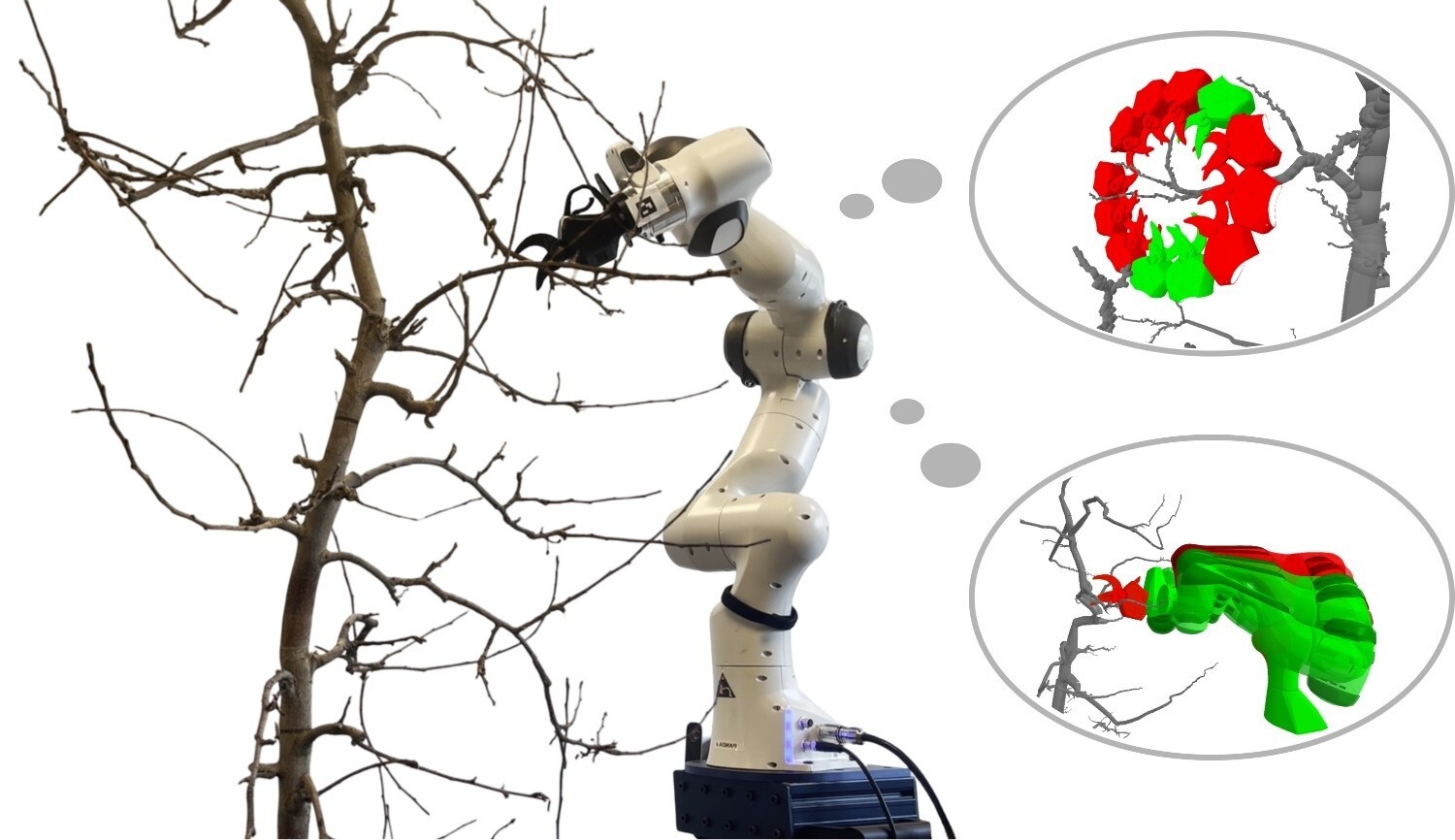
- 论文提出综合修剪工作流程,整合感知、建模与整体规划,解决高维机械臂在复杂环境中的行为规划问题。
- 实验表明,更全面的规划方法能显著提升机器人机械臂的修剪性能,并在真实机器人上验证了所提工作流程。
📝 摘要(中文)
果树修剪是果园管理中至关重要的农业实践。适当的修剪能够促进更健康的生长,并在果园的整个生命周期内优化水果产量。机器人机械臂已被开发为这种重复性任务的自动化解决方案,该任务通常需要具有专业技能的季节性劳动力。虽然之前的研究主要集中在感知方面的挑战,但操作的复杂性往往被忽视。这些挑战包括在关节空间和笛卡尔空间中进行规划和控制,以引导末端执行器通过复杂的、有阻碍的树枝。本文针对机器人修剪系统的行为规划挑战,提出了一个多层次规划问题,该问题存在于复杂碰撞的环境中。我们针对修剪场景中高维机器人手臂的规划问题进行了公式化,研究了系统的内在冗余性,并提出了一个综合的修剪工作流程,该流程集成了感知、建模和整体规划。在我们的实验中,我们证明了更全面的规划方法可以显著提高机器人机械臂的性能。最后,我们将提出的工作流程应用于真实的机器人。因此,这项工作补充了之前在机器人修剪方面所做的努力,并推动了未来在修剪应用规划方面的研究和开发。
🔬 方法详解
问题定义:论文旨在解决果树修剪机器人行为规划问题,尤其是在复杂、充满障碍物的果树环境中,如何高效、安全地控制高自由度机械臂完成修剪任务。现有方法往往侧重于感知,忽略了在关节空间和笛卡尔空间中进行复杂运动规划的挑战,导致操作效率低下或易发生碰撞。
核心思路:论文的核心思路是采用一种综合的、多层次的规划方法,充分利用机械臂的冗余自由度,在感知的基础上建立环境模型,并进行全局优化,从而在复杂的环境中找到最佳的修剪路径和姿态。这种方法强调整体规划,而非简单的局部避障。
技术框架:该修剪工作流程主要包含三个阶段:1) 感知阶段,利用传感器获取果树的三维结构信息;2) 建模阶段,基于感知数据建立果树的几何模型,并识别需要修剪的树枝;3) 规划阶段,综合考虑机械臂的运动学约束、环境障碍物以及修剪任务的要求,进行全局路径规划和姿态优化,生成可执行的修剪动作序列。
关键创新:论文的关键创新在于将感知、建模和整体规划整合到一个统一的框架中,并充分利用机械臂的冗余自由度进行优化。与传统的局部避障方法相比,该方法能够更好地应对复杂环境,提高修剪效率和安全性。此外,论文还针对修剪任务的特点,设计了特定的规划算法和优化目标。
关键设计:论文中可能涉及的关键设计包括:1) 用于环境建模的三维重建算法;2) 基于优化的路径规划算法,例如RRT*或PRM;3) 考虑机械臂运动学约束和碰撞检测的姿态优化方法;4) 用于评估修剪效果的指标,例如修剪后的树冠结构和光照分布。
🖼️ 关键图片


📊 实验亮点
实验结果表明,所提出的综合规划方法能够显著提高机器人机械臂的修剪性能。具体而言,与传统的局部避障方法相比,该方法能够更有效地避免碰撞,提高修剪效率,并生成更符合要求的修剪结果。论文还在真实机器人平台上验证了该方法的有效性。
🎯 应用场景
该研究成果可应用于农业机器人领域,实现果树、葡萄等经济作物的自动化修剪,降低人工成本,提高修剪质量和效率。此外,该方法也可推广到其他复杂环境下的机器人操作任务,如建筑、医疗等领域,具有广阔的应用前景和重要的实际价值。
📄 摘要(原文)
Pruning is an essential agricultural practice for orchards. Proper pruning can promote healthier growth and optimize fruit production throughout the orchard's lifespan. Robot manipulators have been developed as an automated solution for this repetitive task, which typically requires seasonal labor with specialized skills. While previous research has primarily focused on the challenges of perception, the complexities of manipulation are often overlooked. These challenges involve planning and control in both joint and Cartesian spaces to guide the end-effector through intricate, obstructive branches. Our work addresses the behavior planning challenge for a robotic pruning system, which entails a multi-level planning problem in environments with complex collisions. In this paper, we formulate the planning problem for a high-dimensional robotic arm in a pruning scenario, investigate the system's intrinsic redundancies, and propose a comprehensive pruning workflow that integrates perception, modeling, and holistic planning. In our experiments, we demonstrate that more comprehensive planning methods can significantly enhance the performance of the robotic manipulator. Finally, we implement the proposed workflow on a real-world robot. As a result, this work complements previous efforts on robotic pruning and motivates future research and development in planning for pruning applications.