M3D-skin: Multi-material 3D-printed Tactile Sensor with Hierarchical Infill Structures for Pressure Sensing
作者: Shunnosuke Yoshimura, Kento Kawaharazuka, Kei Okada
分类: cs.RO
发布日期: 2025-10-14
备注: Accepted to IROS2025, Website: https://ssk-yoshimura.github.io/M3D-skin/
💡 一句话要点
提出基于多材料3D打印和分层填充结构的触觉传感器M3D-skin,用于压力感知。
🎯 匹配领域: 支柱七:动作重定向 (Motion Retargeting) 支柱八:物理动画 (Physics-based Animation)
关键词: 触觉传感器 多材料3D打印 分层结构 压力感知 机器人 柔性电子 FDM 运动测量
📋 核心要点
- 传统触觉传感器制造复杂,集成困难,限制了其应用范围,需要更易于制造和集成的方案。
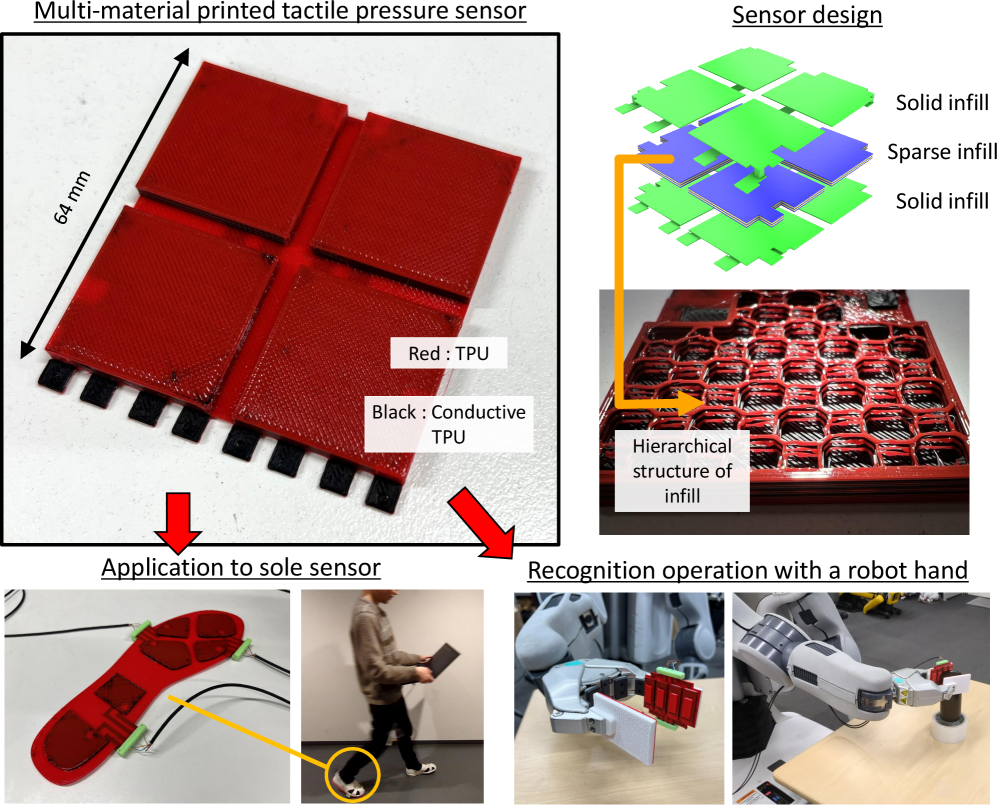
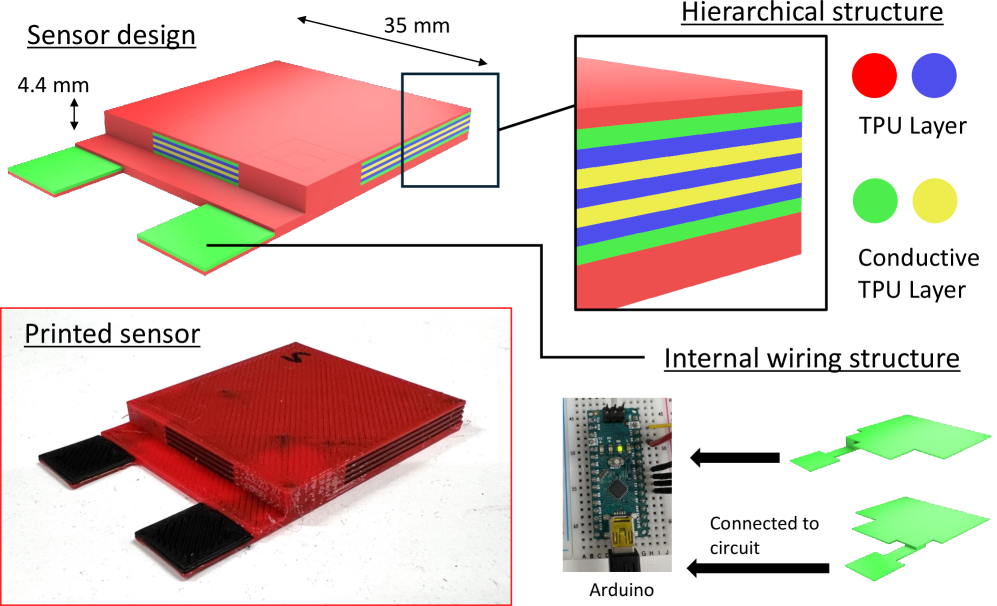
- 利用多材料3D打印机的填充模式,通过导电和非导电材料构建分层结构,实现压力到电阻变化的转换。
- 实验验证了该传感器在足底运动测量、机械手集成和触觉机器人操作中的有效性。
📝 摘要(中文)
本文提出了一种名为M3D-skin的触觉传感器,该传感器利用多材料熔融沉积建模(FDM)3D打印机的填充模式作为传感原理,易于制造且具有高度通用性。该方法采用导电和非导电柔性丝材创建具有特定填充模式的分层结构。这种柔性分层结构在压力作用下会发生形变,导致电阻发生变化,从而能够获取触觉信息。本文测量了分层结构修改对所提出的触觉传感器特性变化的影响。此外,还展示了多Tile传感器的制造和使用。作为应用,实现了足底运动模式测量、与机械手的集成以及基于触觉的机器人操作。通过这些实验,验证了所提出的触觉传感器的有效性。
🔬 方法详解
问题定义:论文旨在解决传统触觉传感器制造复杂、集成困难的问题,从而扩展其在机器人抓取、人体运动测量等领域的应用。现有触觉传感器的制造工艺通常较为繁琐,成本较高,且难以根据特定应用进行定制化设计。
核心思路:论文的核心思路是利用多材料3D打印技术,通过控制填充结构,将导电和非导电材料结合,构建具有特定力学特性的分层结构。当外部压力作用于传感器表面时,分层结构发生形变,导致导电材料之间的接触面积或距离发生变化,从而引起电阻值的改变。通过测量电阻值的变化,可以推断出作用在传感器上的压力大小。
技术框架:M3D-skin的制造流程主要包括以下几个步骤:1) 设计具有特定填充模式的3D模型;2) 使用多材料FDM 3D打印机,将导电和非导电柔性丝材按照设计的填充模式进行打印,形成分层结构;3) 将电极连接到导电材料上,以便测量电阻值;4) 对传感器进行校准,建立压力与电阻值之间的关系。
关键创新:该方法的关键创新在于利用3D打印机的填充模式作为传感原理,无需复杂的制造工艺,即可实现触觉传感器的定制化设计和快速制造。通过调整填充密度、填充角度、材料组合等参数,可以灵活地控制传感器的灵敏度、线性度和测量范围。此外,多材料3D打印技术使得可以在同一传感器中集成多种功能,例如同时测量压力和温度。
关键设计:论文中,填充模式的选择至关重要,不同的填充模式会影响传感器的力学特性和灵敏度。导电材料的选择也需要考虑其导电性、柔韧性和与非导电材料的兼容性。此外,电极的连接方式和位置也会影响电阻值的测量精度。论文中没有明确提及损失函数或网络结构,因为该方法主要依赖于材料和结构的物理特性来实现传感功能。
🖼️ 关键图片

📊 实验亮点
实验结果表明,通过调整填充结构,可以有效控制M3D-skin触觉传感器的灵敏度和线性度。多Tile传感器的实验验证了该传感器在大面积触觉感知方面的潜力。在足底运动测量实验中,M3D-skin能够准确捕捉足底压力分布的变化。与机械手集成后,M3D-skin能够帮助机器人实现更精确的抓取操作。
🎯 应用场景
M3D-skin触觉传感器具有广泛的应用前景,包括:机器人灵巧操作(提高抓取精度和稳定性)、人体运动捕捉(用于步态分析、康复训练等)、虚拟现实/增强现实(增强交互体验)、可穿戴设备(健康监测、人机交互)等。该技术有望推动触觉传感器的普及,并促进相关领域的发展。
📄 摘要(原文)
Tactile sensors have a wide range of applications, from utilization in robotic grippers to human motion measurement. If tactile sensors could be fabricated and integrated more easily, their applicability would further expand. In this study, we propose a tactile sensor-M3D-skin-that can be easily fabricated with high versatility by leveraging the infill patterns of a multi-material fused deposition modeling (FDM) 3D printer as the sensing principle. This method employs conductive and non-conductive flexible filaments to create a hierarchical structure with a specific infill pattern. The flexible hierarchical structure deforms under pressure, leading to a change in electrical resistance, enabling the acquisition of tactile information. We measure the changes in characteristics of the proposed tactile sensor caused by modifications to the hierarchical structure. Additionally, we demonstrate the fabrication and use of a multi-tile sensor. Furthermore, as applications, we implement motion pattern measurement on the sole of a foot, integration with a robotic hand, and tactile-based robotic operations. Through these experiments, we validate the effectiveness of the proposed tactile sensor.