Robot Learning: A Tutorial
作者: Francesco Capuano, Caroline Pascal, Adil Zouitine, Thomas Wolf, Michel Aractingi
分类: cs.RO, cs.LG
发布日期: 2025-10-14
备注: Tutorial on Robot Learning using LeRobot, the end-to-end robot learning library developed by Hugging Face
💡 一句话要点
机器人学习教程:从强化学习到通用语言条件模型
🎯 匹配领域: 支柱二:RL算法与架构 (RL & Architecture) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 机器人学习 强化学习 行为克隆 语言条件模型 自主系统 数据驱动 通用模型
📋 核心要点
- 传统机器人控制方法依赖于精确的模型,难以适应复杂和动态环境,限制了机器人的自主性和泛化能力。
- 本教程旨在介绍机器人学习领域的核心概念和最新进展,重点关注强化学习、行为克隆以及语言条件模型等关键技术。
- 教程提供即用型代码示例,帮助读者快速上手实践,并为机器人学习领域的研究和应用做出贡献。
📝 摘要(中文)
机器人学习正处于一个转折点,这得益于机器学习的快速发展和大规模机器人数据的日益普及。从传统的、基于模型的方法到数据驱动的、基于学习的范式的转变,正在释放自主系统中前所未有的能力。本教程旨在引导读者了解现代机器人学习的各个方面,从强化学习和行为克隆的基本原理到能够跨多种任务甚至机器人形态运行的通用语言条件模型。本工作旨在为研究人员和从业人员提供指导,我们的目标是使读者掌握概念理解和实践工具,以便为机器人学习的发展做出贡献,并提供在$ exttt{lerobot}$中实现的即用型示例。
🔬 方法详解
问题定义:机器人学习旨在使机器人能够通过与环境的交互或从数据中学习来执行任务,而无需人工显式编程。现有方法通常依赖于手工设计的控制器或需要大量人工干预,难以泛化到新的任务和环境。此外,如何利用大规模数据和语言信息来提高机器人学习的效率和泛化能力也是一个挑战。
核心思路:本教程的核心思路是介绍机器人学习领域的主流方法,并重点关注如何利用强化学习、行为克隆和语言条件模型来解决机器人学习中的挑战。通过提供清晰的概念解释和实践示例,帮助读者理解这些方法的原理和应用。
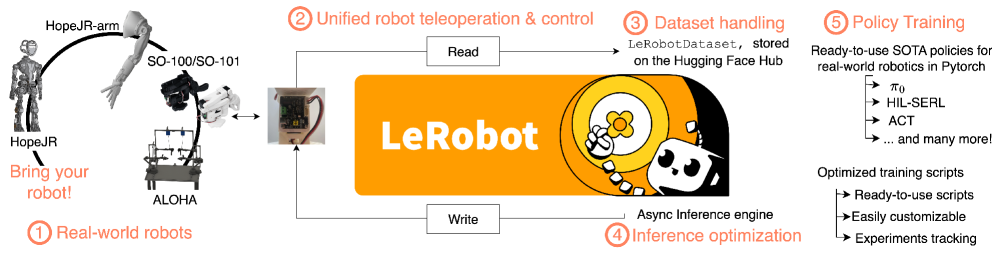
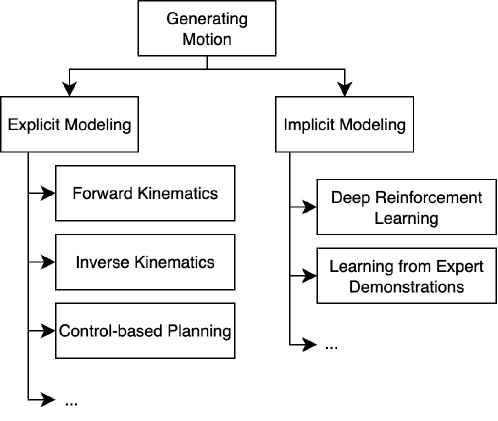
技术框架:本教程涵盖了机器人学习的多个方面,包括:1) 强化学习:介绍基于值函数和策略梯度的强化学习算法,以及如何将其应用于机器人控制。2) 行为克隆:介绍如何从专家演示数据中学习机器人策略。3) 语言条件模型:介绍如何利用自然语言指令来指导机器人的行为。教程还提供了在$ exttt{lerobot}$中实现的即用型示例,方便读者进行实践。
关键创新:本教程的关键创新在于其全面性和实践性。它不仅介绍了机器人学习领域的核心概念和最新进展,还提供了大量的代码示例,帮助读者快速上手实践。此外,教程还重点关注如何利用语言信息来提高机器人学习的效率和泛化能力,这在机器人学习领域是一个新兴的研究方向。
关键设计:教程中的代码示例使用了$ exttt{lerobot}$库,该库提供了一系列用于机器人学习的工具和函数。教程还介绍了如何使用不同的损失函数和网络结构来训练机器人策略。例如,在强化学习中,可以使用TD误差作为损失函数,并使用深度神经网络来表示值函数或策略。
🖼️ 关键图片
📊 实验亮点
本教程提供了一系列在$ exttt{lerobot}$中实现的即用型示例,涵盖了强化学习、行为克隆和语言条件模型等关键技术。这些示例可以帮助读者快速上手实践,并为机器人学习领域的研究和应用做出贡献。具体的性能数据和对比基线需要在实际应用中进行评估。
🎯 应用场景
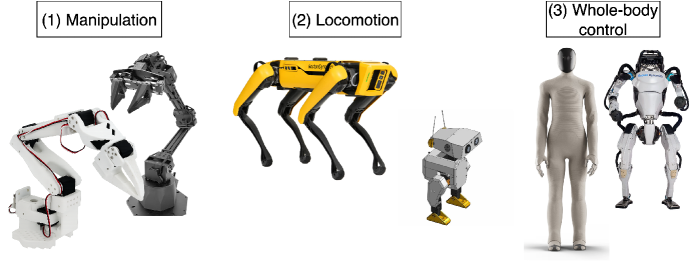
机器人学习技术可应用于各种领域,如工业自动化、医疗保健、家庭服务和自动驾驶。通过学习执行复杂任务,机器人可以提高生产效率、改善医疗服务、提供家庭帮助并实现更安全的交通运输。未来的发展方向包括更强的泛化能力、更好的环境适应性和更自然的人机交互。
📄 摘要(原文)
Robot learning is at an inflection point, driven by rapid advancements in machine learning and the growing availability of large-scale robotics data. This shift from classical, model-based methods to data-driven, learning-based paradigms is unlocking unprecedented capabilities in autonomous systems. This tutorial navigates the landscape of modern robot learning, charting a course from the foundational principles of Reinforcement Learning and Behavioral Cloning to generalist, language-conditioned models capable of operating across diverse tasks and even robot embodiments. This work is intended as a guide for researchers and practitioners, and our goal is to equip the reader with the conceptual understanding and practical tools necessary to contribute to developments in robot learning, with ready-to-use examples implemented in $\texttt{lerobot}$.