Shape-Aware Whole-Body Control for Continuum Robots with Application in Endoluminal Surgical Robotics
作者: Mohammadreza Kasaei, Mostafa Ghobadi, Mohsen Khadem
分类: cs.RO
发布日期: 2025-10-14
💡 一句话要点
提出一种形状感知的全躯干控制框架,用于内窥镜手术机器人,提升安全性和精度。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 连续体机器人 全躯干控制 内窥镜手术机器人 形状感知 模型预测控制
📋 核心要点
- 传统内窥镜手术机器人仅末端控制,易导致组织损伤,难以在复杂解剖结构中精确导航。
- 结合物理信息模型与增强神经ODE,实现精确形状估计和高效雅可比矩阵计算,优化机器人控制。
- 仿真和真实机器人实验表明,该框架提高了管腔跟踪精度,减少了壁接触,增强了适应性。
📝 摘要(中文)
本文提出了一种形状感知的全躯干控制框架,用于肌腱驱动连续体机器人,并直接应用于内窥镜手术导航。支气管镜检查等内窥镜手术需要在复杂的、患者特定的解剖结构中进行精确和安全的导航,而传统的仅末端控制常常导致与管壁接触、组织损伤或无法到达远端目标。为了解决这些挑战,我们的方法将物理信息骨干模型与通过增强神经ODE的残差学习相结合,从而实现精确的形状估计和高效的雅可比矩阵计算。基于采样的模型预测路径积分(MPPI)控制器利用这种表示,在驱动约束下共同优化末端跟踪、骨干一致性和避障。任务管理器通过允许在远程操作期间实时调整目标(如壁间隙或直接前进)来进一步增强适应性。大量的仿真研究表明,在各种场景中,包括轨迹跟踪、动态避障和形状约束到达,都达到了毫米级的精度。在支气管镜检查模型上的真实机器人实验验证了该框架,与仅使用操纵杆导航和现有基线相比,显示出更高的管腔跟踪精度、更少的壁接触和更强的适应性。这些结果突出了所提出的框架在微创内窥镜手术中提高安全性、可靠性和操作员效率的潜力,并更广泛地适用于其他受限和安全关键环境。
🔬 方法详解
问题定义:现有内窥镜手术机器人通常采用末端控制,在复杂且狭窄的腔道内操作时,容易发生与管壁的碰撞,造成组织损伤,并且难以精确到达目标位置。因此,需要一种能够感知机器人整体形状并进行控制的方法,以提高手术的安全性和精度。
核心思路:论文的核心思路是利用物理信息模型和残差学习相结合的方式,实现对连续体机器人形状的精确估计。通过形状估计,可以进行全躯干控制,从而优化机器人的运动轨迹,避免与管壁的碰撞,并提高目标到达的精度。同时,采用模型预测路径积分(MPPI)控制器,在满足驱动约束的条件下,实现末端跟踪、骨干一致性和避障的联合优化。
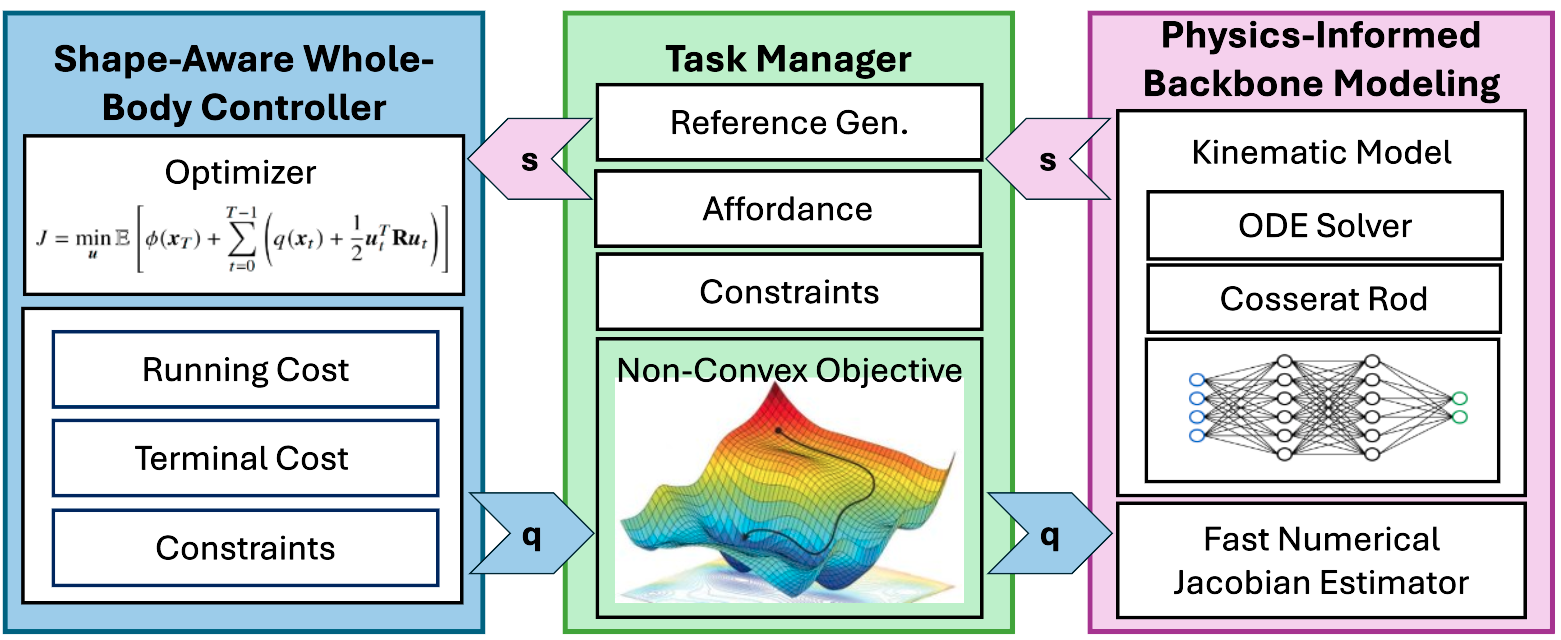
技术框架:该框架主要包含以下几个模块:1) 物理信息骨干模型:用于对连续体机器人的基本形状进行建模。2) 增强神经ODE:通过残差学习对物理信息模型进行修正,提高形状估计的精度。3) 雅可比矩阵计算:基于形状估计结果,计算雅可比矩阵,用于控制器的设计。4) 模型预测路径积分(MPPI)控制器:基于雅可比矩阵,优化机器人的运动轨迹,实现末端跟踪、骨干一致性和避障。5) 任务管理器:允许在远程操作期间实时调整目标,例如壁间隙或直接前进。
关键创新:该论文的关键创新在于将物理信息模型与残差学习相结合,用于连续体机器人的形状估计。与传统的基于传感器或纯模型的形状估计方法相比,该方法能够更精确地估计机器人的形状,并且具有更好的鲁棒性。此外,采用MPPI控制器,能够有效地处理驱动约束,并实现多目标的联合优化。
关键设计:增强神经ODE的具体结构未知,但其作用是通过学习物理信息模型与真实形状之间的残差,提高形状估计的精度。MPPI控制器的关键参数包括采样数量、预测步长和代价函数。代价函数的设计需要综合考虑末端跟踪误差、骨干一致性误差和避障代价。任务管理器允许用户根据实际情况调整各个目标的权重。
🖼️ 关键图片
📊 实验亮点
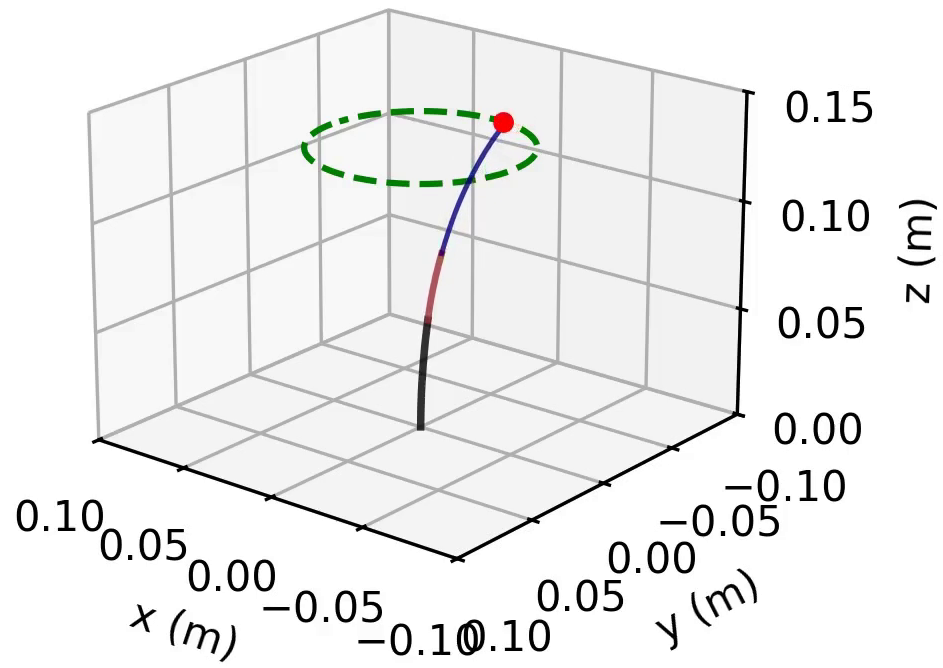
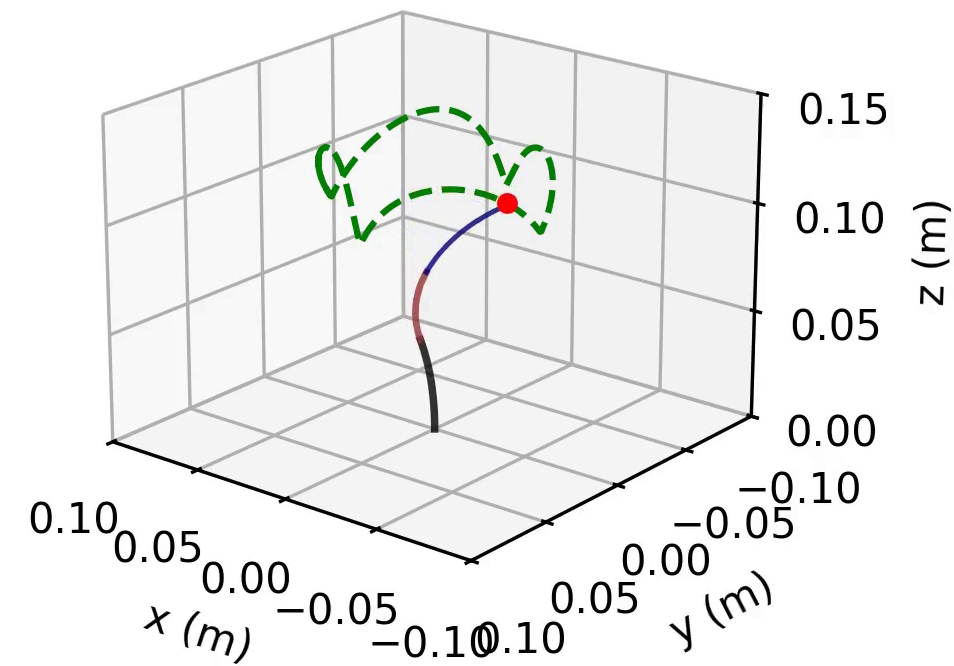
仿真结果表明,该方法在轨迹跟踪、动态避障和形状约束到达等场景中,能够达到毫米级的精度。真实机器人实验表明,与仅使用操纵杆导航和现有基线相比,该方法提高了管腔跟踪精度,减少了壁接触,增强了适应性。具体提升幅度未知。
🎯 应用场景
该研究成果可应用于微创内窥镜手术,如支气管镜检查、结肠镜检查等,提高手术的安全性和精度,减少患者的痛苦。此外,该方法还可应用于其他需要在狭窄和复杂环境中进行操作的机器人,如管道检测机器人、救援机器人等,具有广泛的应用前景。
📄 摘要(原文)
This paper presents a shape-aware whole-body control framework for tendon-driven continuum robots with direct application to endoluminal surgical navigation. Endoluminal procedures, such as bronchoscopy, demand precise and safe navigation through tortuous, patient-specific anatomy where conventional tip-only control often leads to wall contact, tissue trauma, or failure to reach distal targets. To address these challenges, our approach combines a physics-informed backbone model with residual learning through an Augmented Neural ODE, enabling accurate shape estimation and efficient Jacobian computation. A sampling-based Model Predictive Path Integral (MPPI) controller leverages this representation to jointly optimize tip tracking, backbone conformance, and obstacle avoidance under actuation constraints. A task manager further enhances adaptability by allowing real-time adjustment of objectives, such as wall clearance or direct advancement, during tele-operation. Extensive simulation studies demonstrate millimeter-level accuracy across diverse scenarios, including trajectory tracking, dynamic obstacle avoidance, and shape-constrained reaching. Real-robot experiments on a bronchoscopy phantom validate the framework, showing improved lumen-following accuracy, reduced wall contacts, and enhanced adaptability compared to joystick-only navigation and existing baselines. These results highlight the potential of the proposed framework to increase safety, reliability, and operator efficiency in minimally invasive endoluminal surgery, with broader applicability to other confined and safety-critical environments.