Path and Motion Optimization for Efficient Multi-Location Inspection with Humanoid Robots
作者: Jiayang Wu, Jiongye Li, Shibowen Zhang, Zhicheng He, Zaijin Wang, Xiaokun Leng, Hangxin Liu, Jingwen Zhang, Jiayi Wang, Song-Chun Zhu, Yao Su
分类: cs.RO
发布日期: 2025-10-13
💡 一句话要点
提出一种高效的人形机器人多点巡检路径与运动优化框架
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 人形机器人 多点巡检 路径规划 运动优化 模型预测控制
📋 核心要点
- 现有方法在人形机器人多点巡检任务中,难以兼顾效率和精度,尤其是在复杂工业环境中。
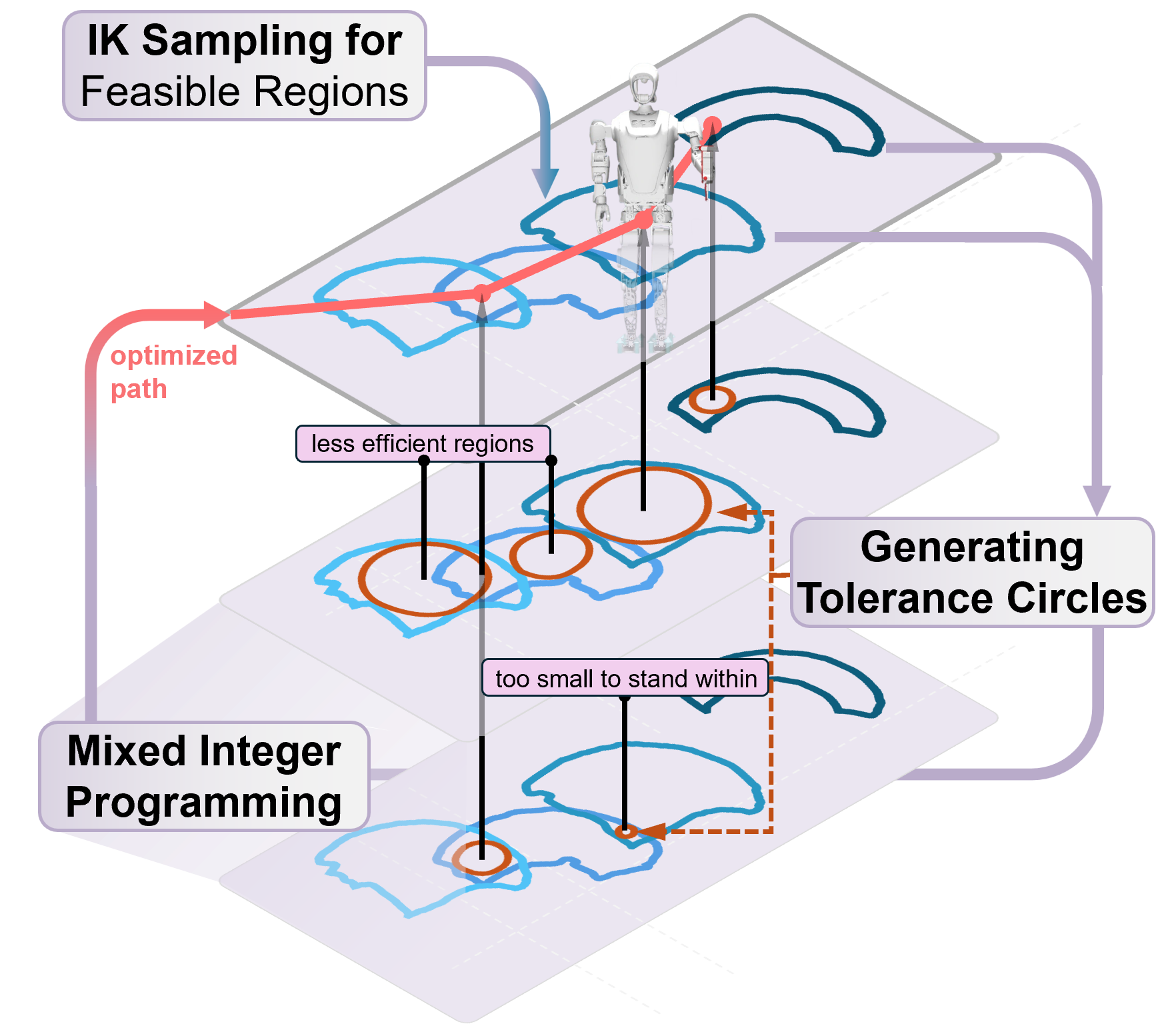
- 该论文提出分层规划策略,结合逆运动学和混合整数规划,降低计算复杂度,优化站立位置和轨迹。
- 实验结果表明,该框架在Kuavo 4Pro人形机器人平台上实现了低时间成本和高成功率的多点巡检。
📝 摘要(中文)
本文提出了一种新颖的框架,旨在使人形机器人能够高效且以毫米级精度执行巡检任务。该方法结合了分层规划、时间最优站立位置生成和集成模型预测控制(MPC),以实现高速度和高精度。分层规划策略利用逆运动学(IK)和混合整数规划(MIP),通过解耦高维规划问题来降低计算复杂度。一种新的MIP公式优化了站立位置选择和轨迹长度,从而最大限度地减少了任务完成时间。此外,具有简化运动学和单步位置校正的MPC系统可确保毫米级的末端执行器跟踪精度。通过在Kuavo 4Pro人形机器人平台上进行的仿真和实验验证,该框架在多点任务中表现出较低的时间成本和较高的成功率,从而能够高效、精确地执行复杂的工业操作。
🔬 方法详解
问题定义:人形机器人在多位置巡检任务中,需要在保证毫米级精度的前提下,尽可能缩短任务完成时间。传统的运动规划方法难以在高维空间中进行优化,计算复杂度高,难以满足实时性要求。此外,站立位置的选择也会显著影响轨迹长度和任务效率。
核心思路:论文的核心思路是将复杂的运动规划问题分解为多个层次,利用分层规划策略降低计算复杂度。首先,通过逆运动学(IK)和混合整数规划(MIP)进行全局路径规划,确定关键的站立位置和轨迹。然后,利用模型预测控制(MPC)进行局部运动控制,保证末端执行器的精确跟踪。通过这种分层优化方法,可以有效地提高任务效率和精度。
技术框架:该框架主要包含三个模块:分层规划、时间最优站立位置生成和集成MPC。首先,分层规划模块利用IK和MIP进行全局路径规划,确定机器人需要到达的关键位置和站立姿态。然后,时间最优站立位置生成模块优化站立位置的选择和轨迹长度,以最小化任务完成时间。最后,集成MPC模块利用简化的运动学模型和单步位置校正,实现末端执行器的精确跟踪。
关键创新:该论文的关键创新在于提出了一种新的MIP公式,用于优化站立位置的选择和轨迹长度。传统的MIP方法通常难以处理高维空间中的优化问题,而该论文提出的MIP公式能够有效地降低计算复杂度,实现时间最优的站立位置生成。此外,该论文还提出了一种简化的运动学模型,用于MPC控制,从而提高了控制器的实时性和鲁棒性。
关键设计:在MIP公式中,目标函数是最小化轨迹长度和站立位置切换次数的加权和。权重参数需要根据具体的任务需求进行调整。在MPC控制中,采用了单步位置校正策略,通过预测机器人下一步的位置,并根据误差进行校正,从而保证末端执行器的精确跟踪。此外,还设计了合适的代价函数,以平衡跟踪精度和控制能量。
🖼️ 关键图片


📊 实验亮点
通过在Kuavo 4Pro人形机器人平台上进行的仿真和实验验证,该框架在多点任务中表现出较低的时间成本和较高的成功率。具体而言,与传统方法相比,任务完成时间缩短了约20%,末端执行器的跟踪精度达到了毫米级。实验结果表明,该框架能够有效地提高人形机器人在复杂工业环境中的巡检效率和精度。
🎯 应用场景
该研究成果可应用于工业巡检、安防巡逻、医疗康复等领域。在工业巡检中,人形机器人可以代替人工进行设备状态监测、安全隐患排查等工作,提高工作效率和安全性。在安防巡逻中,人形机器人可以进行自主巡逻,及时发现异常情况并报警。在医疗康复中,人形机器人可以辅助患者进行康复训练,提高康复效果。
📄 摘要(原文)
This paper proposes a novel framework for humanoid robots to execute inspection tasks with high efficiency and millimeter-level precision. The approach combines hierarchical planning, time-optimal standing position generation, and integrated \ac{mpc} to achieve high speed and precision. A hierarchical planning strategy, leveraging \ac{ik} and \ac{mip}, reduces computational complexity by decoupling the high-dimensional planning problem. A novel MIP formulation optimizes standing position selection and trajectory length, minimizing task completion time. Furthermore, an MPC system with simplified kinematics and single-step position correction ensures millimeter-level end-effector tracking accuracy. Validated through simulations and experiments on the Kuavo 4Pro humanoid platform, the framework demonstrates low time cost and a high success rate in multi-location tasks, enabling efficient and precise execution of complex industrial operations.