Design and Koopman Model Predictive Control of A Soft Exoskeleton Based on Origami-Inspired Pneumatic Actuator for Knee Rehabilitation
作者: Junxiang Wang, Han Zhang, Zehao Wang, Huaiyuan Chen, Pu Wang, Weidong Chen
分类: cs.RO
发布日期: 2025-10-13
💡 一句话要点
提出基于折纸气动软体外骨骼的Koopman模型预测控制方法,用于膝关节康复。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 软体外骨骼 膝关节康复 Koopman模型 模型预测控制 肌电信号 人机交互 折纸结构
📋 核心要点
- 传统刚性外骨骼笨重且穿戴复杂,需要额外的柔顺性控制以保证安全,而软体外骨骼具有固有柔顺性,但其复杂的人机交互动力学给控制带来挑战。
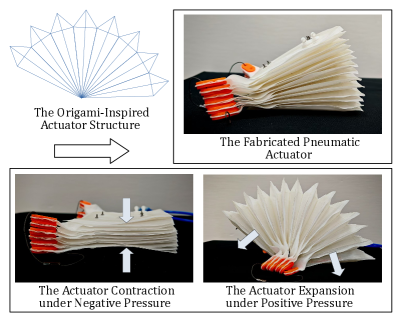
- 本文提出了一种基于折纸气动执行器的软体外骨骼,并利用深度Koopman网络对人机交互动力学进行建模,为软体康复机器人提供了一种新的控制框架。
- 实验结果表明,将EMG信号融入Koopman模型能显著提高模型精度,个性化Koopman模型优于非个性化模型,且所提出的控制框架优于传统的PID控制。
📝 摘要(中文)
本文提出了一种基于折纸气动执行器的软体外骨骼,用于膝关节康复。软体外骨骼穿戴舒适,但其复杂非线性的人-机交互动力学给控制带来了挑战。本文利用深度Koopman网络对人-机交互动力学进行建模,将肌电信号(EMG)和控制气动执行器阀门和泵的PWM波占空比作为输入,线性Koopman模型能够准确捕捉复杂的人-机交互动力学。在此基础上,采用模型预测控制(MPC)控制软体机器人,辅助用户进行实时康复训练,目标是跟踪屏幕上给定的参考信号。实验结果表明,将EMG信号融入Koopman模型能够显著提高模型精度。此外,基于个体数据训练的个性化Koopman模型优于非个性化模型。所提出的控制框架在被动和主动训练模式下均优于传统的PID控制。因此,该方法为软体康复机器人提供了一种新的控制框架。
🔬 方法详解
问题定义:论文旨在解决软体外骨骼在膝关节康复应用中,由于复杂非线性人-机交互动力学带来的控制难题。现有方法,如PID控制,难以有效处理这种非线性,导致控制性能不佳。传统刚性外骨骼虽然控制相对简单,但舒适性和安全性不足。
核心思路:论文的核心思路是利用Koopman理论将非线性系统近似为线性系统,从而简化控制器的设计。通过深度Koopman网络学习人-机交互动力学,将肌电信号(EMG)和控制信号作为输入,建立线性化的Koopman模型。这样,就可以利用线性控制理论,如模型预测控制(MPC),来实现对软体外骨骼的精确控制。
技术框架:整体框架包括以下几个主要模块:1) 基于折纸气动执行器的软体外骨骼设计;2) 数据采集,包括EMG信号、控制信号和关节角度等;3) 深度Koopman网络训练,用于学习人-机交互动力学;4) 基于Koopman模型的模型预测控制(MPC)设计;5) 实时康复训练,通过MPC控制软体外骨骼,辅助用户跟踪屏幕上的参考信号。
关键创新:最重要的技术创新点在于将深度Koopman网络与模型预测控制相结合,用于软体外骨骼的控制。与传统方法相比,该方法能够更好地处理非线性人-机交互动力学,提高控制精度和鲁棒性。此外,将EMG信号作为Koopman网络的输入,能够进一步提高模型的预测精度。
关键设计:深度Koopman网络的具体结构未知,但关键在于如何选择合适的观测函数来构建Koopman空间。损失函数的设计目标是最小化预测误差,可能包括关节角度的预测误差和控制信号的预测误差。MPC控制器的设计需要考虑控制目标(跟踪参考信号)、约束条件(关节角度范围、气压范围等)和优化目标(最小化跟踪误差和控制能量)。
🖼️ 关键图片

📊 实验亮点
实验结果表明,将EMG信号融入Koopman模型能够显著提高模型精度,具体提升幅度未知。个性化Koopman模型优于非个性化模型,表明了个性化建模的重要性。所提出的控制框架在被动和主动训练模式下均优于传统的PID控制,证明了该方法的有效性。具体的性能数据,如跟踪误差的降低百分比,在摘要中未给出。
🎯 应用场景
该研究成果可应用于中风、脊髓损伤等引起的下肢功能障碍患者的康复训练。通过个性化的Koopman模型和实时模型预测控制,可以为患者提供安全、舒适、高效的康复方案。未来,该技术有望推广到其他关节的康复,并与其他康复技术(如虚拟现实、生物反馈)相结合,进一步提高康复效果。
📄 摘要(原文)
Effective rehabilitation methods are essential for the recovery of lower limb dysfunction caused by stroke. Nowadays, robotic exoskeletons have shown great potentials in rehabilitation. Nevertheless, traditional rigid exoskeletons are usually heavy and need a lot of work to help the patients to put them on. Moreover, it also requires extra compliance control to guarantee the safety. In contrast, soft exoskeletons are easy and comfortable to wear and have intrinsic compliance, but their complex nonlinear human-robot interaction dynamics would pose significant challenges for control. In this work, based on the pneumatic actuators inspired by origami, we design a rehabilitation exoskeleton for knee that is easy and comfortable to wear. To guarantee the control performance and enable a nice human-robot interaction, we first use Deep Koopman Network to model the human-robot interaction dynamics. In particular, by viewing the electromyography (EMG) signals and the duty cycle of the PWM wave that controls the pneumatic robot's valves and pump as the inputs, the linear Koopman model accurately captures the complex human-robot interaction dynamics. Next, based on the obtained Koopman model, we further use Model Predictive Control (MPC) to control the soft robot and help the user to do rehabilitation training in real-time. The goal of the rehabilitation training is to track a given reference signal shown on the screen. Experiments show that by integrating the EMG signals into the Koopman model, we have improved the model accuracy to great extent. In addition, a personalized Koopman model trained from the individual's own data performs better than the non-personalized model. Consequently, our control framework outperforms the traditional PID control in both passive and active training modes. Hence the proposed method provides a new control framework for soft rehabilitation robots.