Flow Matching-Based Autonomous Driving Planning with Advanced Interactive Behavior Modeling
作者: Tianyi Tan, Yinan Zheng, Ruiming Liang, Zexu Wang, Kexin Zheng, Jinliang Zheng, Jianxiong Li, Xianyuan Zhan, Jingjing Liu
分类: cs.RO, cs.AI
发布日期: 2025-10-13
备注: 26 pages, 6 figures. Accepted at NeurIPS 2025
💡 一句话要点
Flow Planner:基于流匹配的自动驾驶规划,提升复杂交互行为建模能力
🎯 匹配领域: 支柱二:RL算法与架构 (RL & Architecture) 支柱四:生成式动作 (Generative Motion)
关键词: 自动驾驶规划 交互行为建模 流匹配 轨迹Tokenization 多模态生成 nuPlan数据集 interPlan数据集
📋 核心要点
- 现有自动驾驶规划方法在复杂交互场景中建模能力不足,依赖过度设计的架构,且缺乏对交互行为的专用机制。
- Flow Planner通过细粒度轨迹tokenization、高效时空融合架构和流匹配生成模型,提升交互行为建模能力。
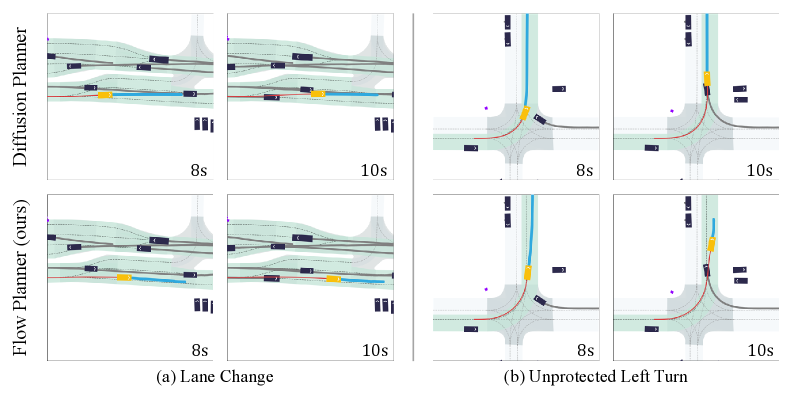
- 在nuPlan和interPlan数据集上的实验表明,Flow Planner在交互行为建模方面达到了最先进的性能。
📝 摘要(中文)
在复杂场景中建模交互式驾驶行为仍然是自动驾驶规划的一个根本挑战。基于学习的方法试图利用先进的生成模型来解决这一挑战,从而消除了对过度设计的表示融合架构的依赖。然而,简单地堆叠Transformer块的暴力实现缺乏用于建模真实驾驶场景中常见的交互行为的专用机制。交互式驾驶数据的稀缺性进一步加剧了这个问题,使得传统的模仿学习方法无法捕捉高价值的交互行为。我们提出了Flow Planner,通过数据建模、模型架构和学习方案的协同创新来解决这些问题。具体来说,我们首先引入细粒度的轨迹tokenization,将轨迹分解为重叠的片段,以降低整个轨迹建模的复杂性。通过精心设计的架构,我们实现了规划和场景信息的有效的时间和空间融合,以更好地捕捉交互行为。此外,该框架结合了流匹配与无分类器引导,用于多模态行为生成,在推理过程中动态地重新加权agent交互,以保持连贯的响应策略,为交互式场景理解提供了关键的提升。在大型nuPlan数据集和具有挑战性的交互式interPlan数据集上的实验结果表明,Flow Planner在基于学习的方法中实现了最先进的性能,同时有效地建模了复杂驾驶场景中的交互行为。
🔬 方法详解
问题定义:现有自动驾驶规划方法难以有效建模复杂交互场景中的驾驶行为,尤其是在数据稀缺的情况下,传统的模仿学习方法难以捕捉高价值的交互行为。简单堆叠Transformer块的方法缺乏针对交互行为的专用机制,导致性能瓶颈。
核心思路:Flow Planner的核心思路是通过协同创新数据建模、模型架构和学习方案来解决上述问题。通过细粒度的轨迹tokenization降低建模复杂度,精心设计的架构实现高效的时空信息融合,并利用流匹配生成模型动态调整agent交互权重,从而提升交互行为建模能力。
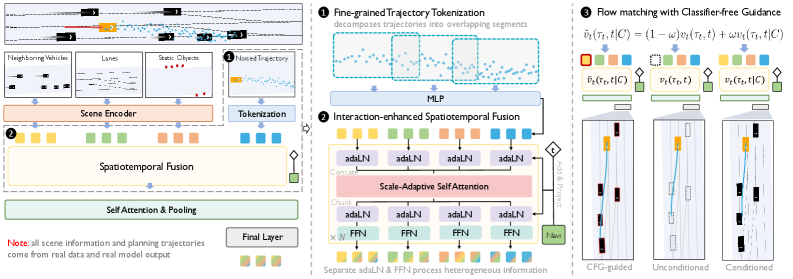
技术框架:Flow Planner的整体框架包含以下几个主要模块:1) 细粒度轨迹Tokenization模块,将轨迹分解为重叠的片段;2) 时空信息融合模块,用于融合规划和场景信息,捕捉交互行为;3) 基于流匹配的生成模块,利用classifier-free guidance生成多模态行为;4) 动态交互权重调整模块,在推理过程中动态调整agent交互权重。
关键创新:Flow Planner的关键创新在于:1) 细粒度的轨迹tokenization,降低了轨迹建模的复杂度;2) 精心设计的时空信息融合架构,能够有效捕捉交互行为;3) 结合流匹配与classifier-free guidance的多模态行为生成方法,能够动态调整agent交互权重,保持连贯的响应策略。
关键设计:轨迹tokenization采用重叠的片段,以保证信息的连续性。时空信息融合架构的具体设计细节未知。流匹配生成模型采用classifier-free guidance,具体实现细节未知。动态交互权重调整模块的具体实现细节未知。
🖼️ 关键图片
📊 实验亮点
Flow Planner在nuPlan和interPlan数据集上进行了实验验证,结果表明其在交互行为建模方面达到了最先进的性能。具体的性能数据和提升幅度未知,但论文强调Flow Planner能够有效地建模复杂驾驶场景中的交互行为。
🎯 应用场景
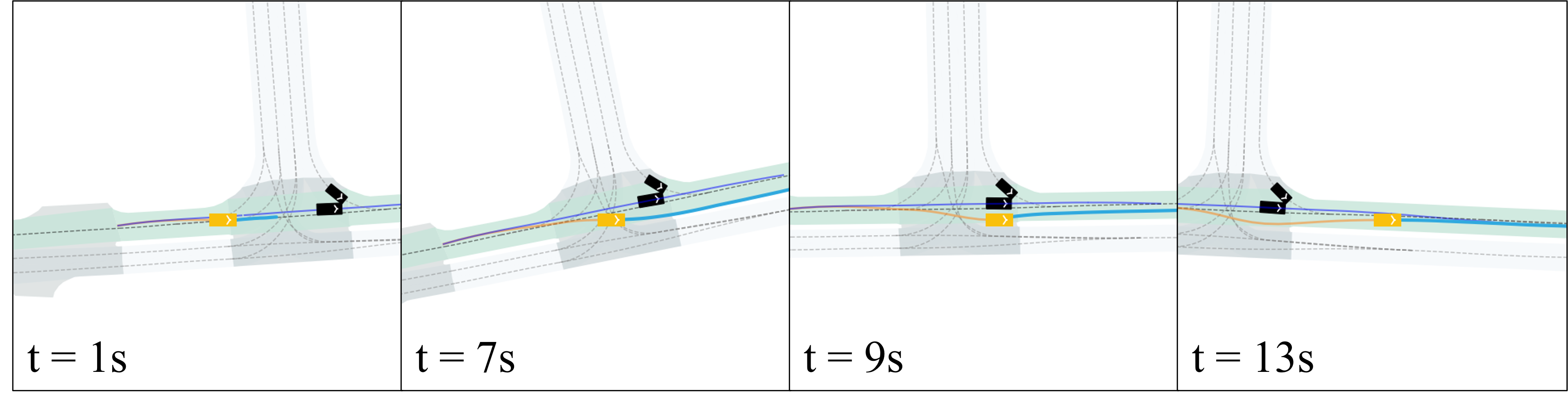
Flow Planner可应用于各种自动驾驶场景,尤其是在需要频繁交互的复杂交通环境中,例如城市道路、十字路口等。该研究成果有助于提升自动驾驶系统的安全性、可靠性和智能化水平,加速自动驾驶技术的商业化落地,并为未来的智能交通系统提供技术支撑。
📄 摘要(原文)
Modeling interactive driving behaviors in complex scenarios remains a fundamental challenge for autonomous driving planning. Learning-based approaches attempt to address this challenge with advanced generative models, removing the dependency on over-engineered architectures for representation fusion. However, brute-force implementation by simply stacking transformer blocks lacks a dedicated mechanism for modeling interactive behaviors that are common in real driving scenarios. The scarcity of interactive driving data further exacerbates this problem, leaving conventional imitation learning methods ill-equipped to capture high-value interactive behaviors. We propose Flow Planner, which tackles these problems through coordinated innovations in data modeling, model architecture, and learning scheme. Specifically, we first introduce fine-grained trajectory tokenization, which decomposes the trajectory into overlapping segments to decrease the complexity of whole trajectory modeling. With a sophisticatedly designed architecture, we achieve efficient temporal and spatial fusion of planning and scene information, to better capture interactive behaviors. In addition, the framework incorporates flow matching with classifier-free guidance for multi-modal behavior generation, which dynamically reweights agent interactions during inference to maintain coherent response strategies, providing a critical boost for interactive scenario understanding. Experimental results on the large-scale nuPlan dataset and challenging interactive interPlan dataset demonstrate that Flow Planner achieves state-of-the-art performance among learning-based approaches while effectively modeling interactive behaviors in complex driving scenarios.