Contact Sensing via Joint Torque Sensors and a Force/Torque Sensor for Legged Robots
作者: Jared Grinberg, Yanran Ding
分类: cs.RO
发布日期: 2025-10-12
备注: Proc. IEEE 21st International Conference on Automation Science and Engineering (CASE), Los Angeles, CA, USA, Aug. 17-21, 2025, pp. 1-7, doi:10.1109/CASE58245.2025.11164031
期刊: Proc. IEEE 21st International Conference on Automation Science and Engineering (CASE), Los Angeles, CA, USA, Aug. 17-21, 2025, pp. 1-7
DOI: 10.1109/CASE58245.2025.11164031
💡 一句话要点
提出基于力矩传感器融合的腿式机器人接触感知方法
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 腿式机器人 接触感知 力矩传感器 力/力矩传感器 动量观测器
📋 核心要点
- 现有腿式机器人接触感知依赖复杂摩擦模型或电机电流估计,精度受限。
- 提出一种基于分布式关节力矩传感器和髋部力/力矩传感器的接触感知框架。
- 实验验证了该框架在接触力恢复和定位方面的准确性,定位精度达到亚厘米级。
📝 摘要(中文)
本文提出了一种利用分布式关节力矩传感器和髋部安装的力/力矩(FT)传感器,通过广义动量观测器框架,检测和定位机器人腿部接触的方法。我们设计了一种低成本的基于应变片的关节力矩传感器,可以安装在每个关节上,以提供直接的力矩测量,无需复杂的摩擦模型,并提供比基于电机电流估计更准确的力矩读数。在基于浮动基座的2自由度机器人腿上的仿真研究验证了所提出的框架能够准确地恢复大腿和小腿连杆上的接触力和位置。通过校准程序,我们的力矩传感器实现了相对于真实测量值平均96.4%的精度。基于该力矩传感器,我们在一个2自由度机械臂上进行了硬件实验,结果表明接触定位精度达到亚厘米级,力误差低于0.2 N。
🔬 方法详解
问题定义:腿式机器人需要准确的接触感知来实现稳定运动和环境交互。然而,传统的接触感知方法依赖于复杂的摩擦模型或基于电机电流的力矩估计,这些方法容易受到模型误差和噪声的影响,导致接触力估计不准确,进而影响机器人的控制性能。因此,需要一种更准确、更鲁棒的接触感知方法。
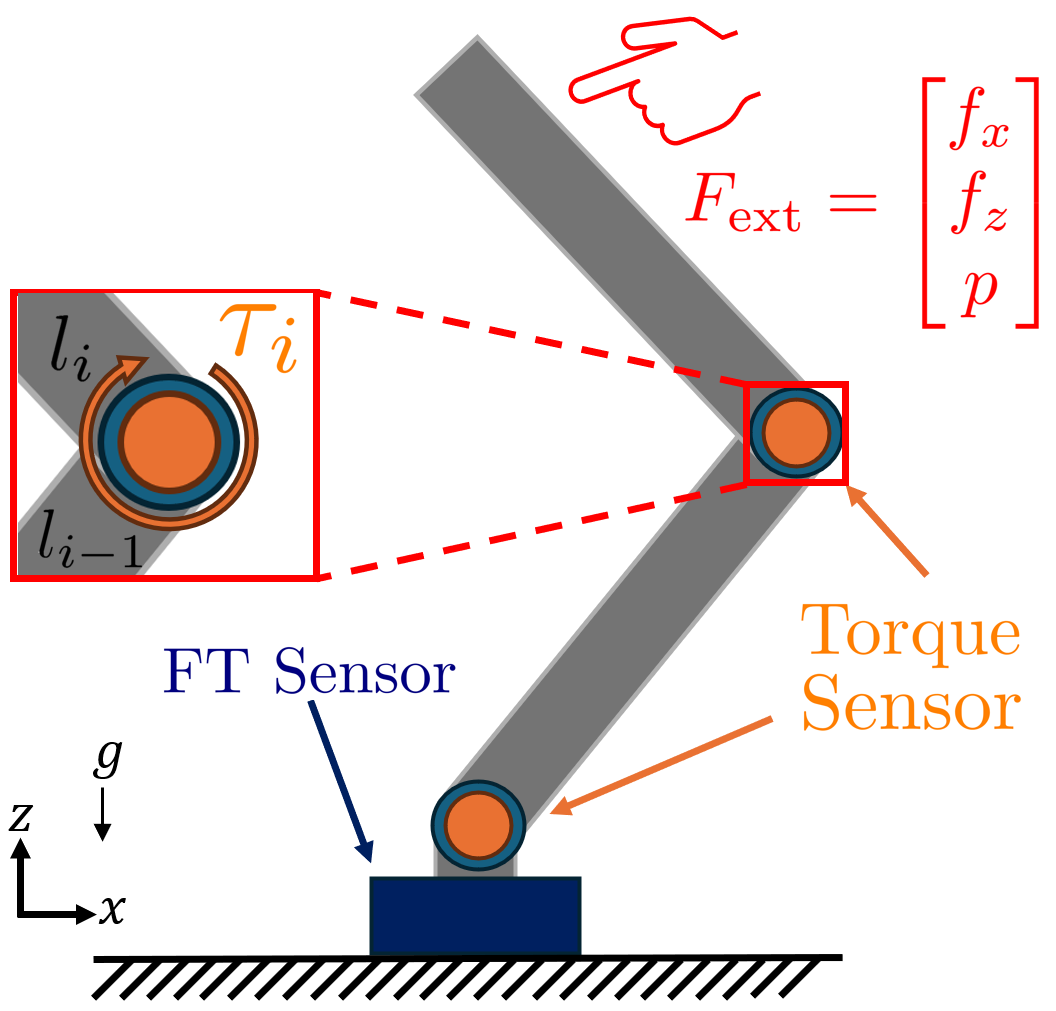
核心思路:本文的核心思路是利用分布式关节力矩传感器直接测量关节力矩,结合髋部安装的力/力矩传感器,通过广义动量观测器框架,估计腿部各处的接触力和位置。这种方法避免了对复杂摩擦模型的依赖,并提供了更准确的力矩测量,从而提高了接触感知的精度和鲁棒性。
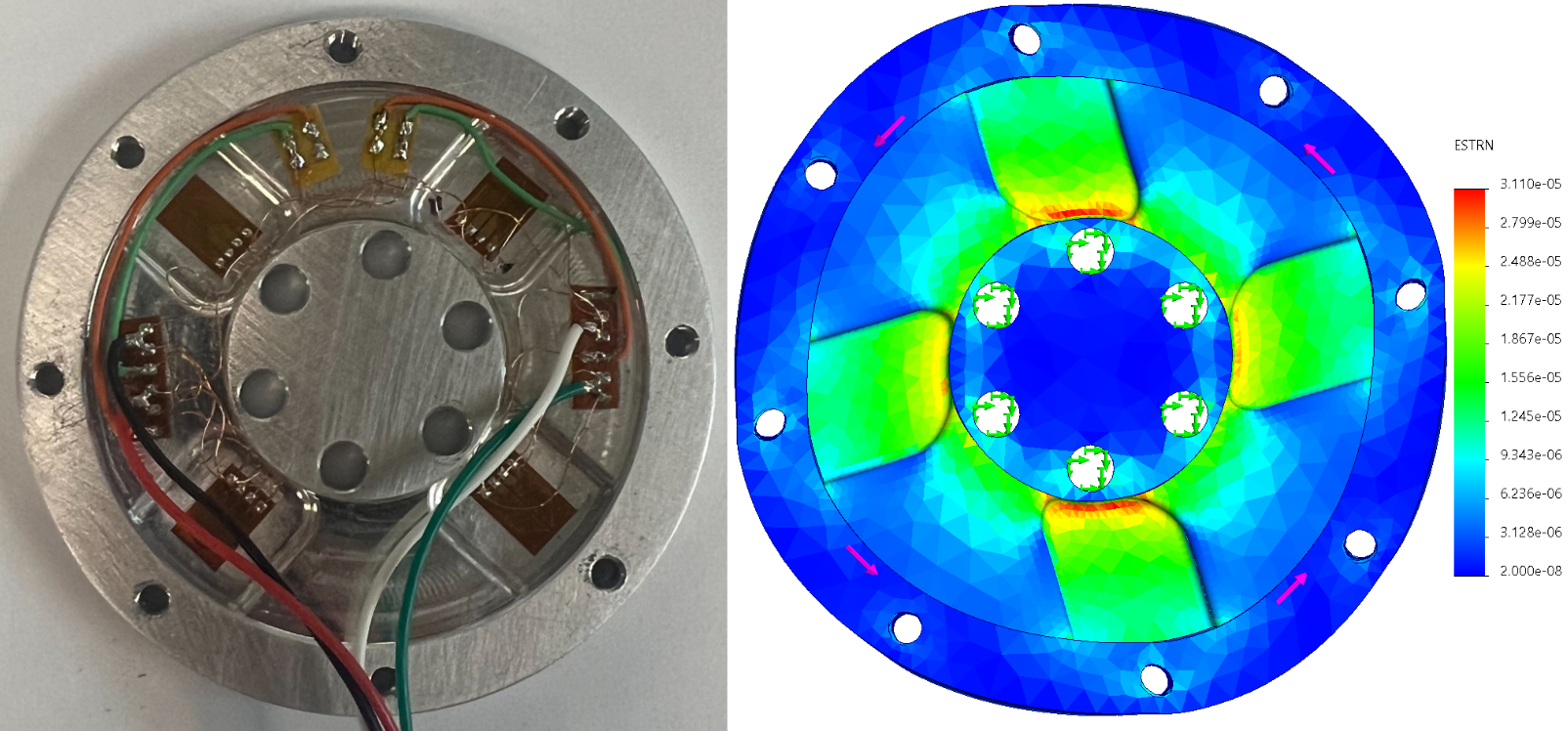
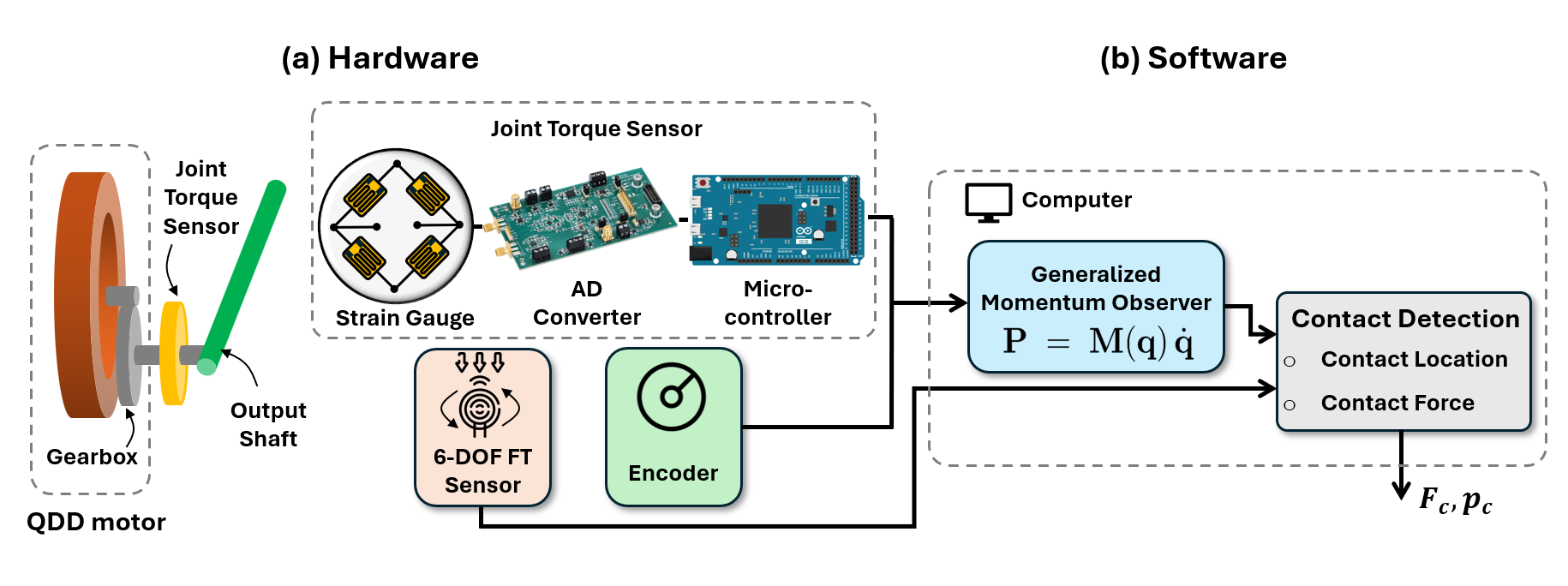
技术框架:该方法的技术框架主要包括以下几个模块:1) 低成本关节力矩传感器设计与校准;2) 髋部力/力矩传感器数据采集;3) 基于广义动量观测器的接触力估计器;4) 接触位置解算模块。首先,通过应变片测量关节的形变,从而获得关节力矩。然后,将关节力矩传感器和髋部力/力矩传感器的数据输入到广义动量观测器中,估计腿部各处的接触力。最后,利用接触力信息解算接触位置。
关键创新:该方法最重要的技术创新点在于:1) 提出了一种低成本、高精度的关节力矩传感器设计方案,该传感器可以直接测量关节力矩,避免了对复杂摩擦模型的依赖;2) 将分布式关节力矩传感器和髋部力/力矩传感器的数据融合到广义动量观测器框架中,提高了接触力估计的精度和鲁棒性。
关键设计:关节力矩传感器采用基于应变片的结构,通过测量关节的微小形变来推算关节力矩。为了保证传感器的精度,需要进行精确的校准。校准过程包括:1) 施加已知的力矩;2) 测量传感器的输出;3) 建立力矩与传感器输出之间的映射关系。广义动量观测器的设计需要仔细选择观测器的增益,以保证观测器的稳定性和收敛速度。接触位置的解算可以采用几何方法或优化方法。
🖼️ 关键图片
📊 实验亮点
实验结果表明,所提出的关节力矩传感器具有较高的精度,相对于真实测量值平均精度达到96.4%。在2自由度机械臂上的硬件实验表明,该方法能够实现亚厘米级的接触定位精度,力误差低于0.2 N。这些结果验证了该方法在接触感知方面的有效性。
🎯 应用场景
该研究成果可应用于腿式机器人的多种场景,例如:复杂地形下的稳定行走、人机协作中的安全交互、以及环境探索中的物体识别与操作。通过精确的接触感知,机器人能够更好地适应环境变化,提高运动的鲁棒性和安全性,并实现更复杂的操作任务。未来,该技术有望推动腿式机器人在物流、救援、医疗等领域的广泛应用。
📄 摘要(原文)
This paper presents a method for detecting and localizing contact along robot legs using distributed joint torque sensors and a single hip-mounted force-torque (FT) sensor using a generalized momentum-based observer framework. We designed a low-cost strain-gauge-based joint torque sensor that can be installed on every joint to provide direct torque measurements, eliminating the need for complex friction models and providing more accurate torque readings than estimation based on motor current. Simulation studies on a floating-based 2-DoF robot leg verified that the proposed framework accurately recovers contact force and location along the thigh and shin links. Through a calibration procedure, our torque sensor achieved an average 96.4% accuracy relative to ground truth measurements. Building upon the torque sensor, we performed hardware experiments on a 2-DoF manipulator, which showed sub-centimeter contact localization accuracy and force errors below 0.2 N.