Controllable Generative Trajectory Prediction via Weak Preference Alignment
作者: Yongxi Cao, Julian F. Schumann, Jens Kober, Joni Pajarinen, Arkady Zgonnikov
分类: cs.RO, cs.LG
发布日期: 2025-10-12
💡 一句话要点
提出PrefCVAE,通过弱偏好对齐实现可控的生成式轨迹预测。
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 轨迹预测 生成模型 条件变分自编码器 偏好学习 可控生成 自动驾驶 弱监督学习
📋 核心要点
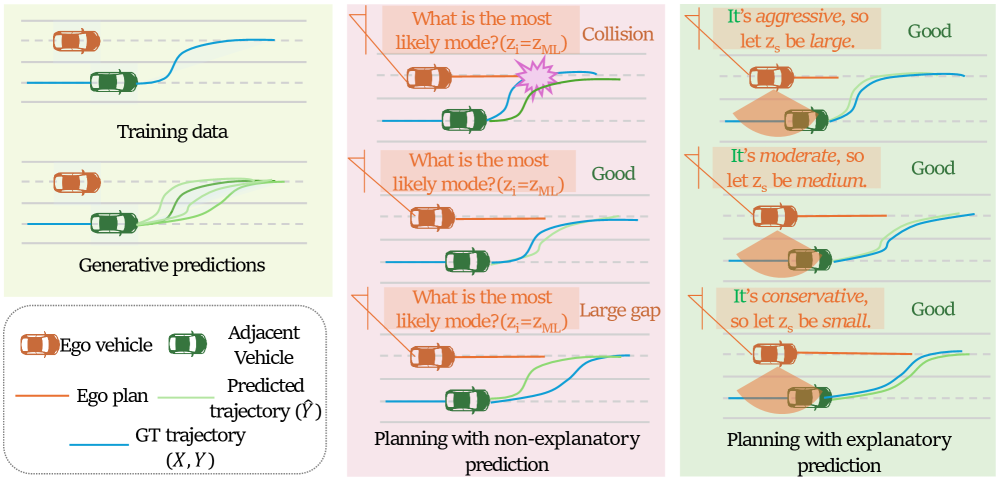
- 现有轨迹预测模型缺乏生成可控多样化轨迹的能力,限制了其在安全规划中的应用。
- PrefCVAE通过引入弱偏好对齐机制,赋予CVAE的潜在变量语义属性,从而实现轨迹生成的可控性。
- 实验表明,PrefCVAE在不降低基线准确性的前提下,能够生成语义上有意义且可控的轨迹预测。
📝 摘要(中文)
深度生成模型,如条件变分自编码器(CVAE),在自动驾驶车辆规划中预测周围智能体的轨迹方面显示出巨大的潜力。现有模型在此类预测任务中已达到显著的准确性。除了准确性之外,多样性对于安全规划也至关重要,因为人类行为本质上是不确定和多模态的。然而,现有方法通常缺乏生成可控多样化轨迹的方案,这比随机多样化的轨迹更有助于安全规划。为了解决这个问题,我们提出了PrefCVAE,一个增强的CVAE框架,它使用弱标记的偏好对来赋予潜在变量语义属性。以平均速度为例,我们证明了PrefCVAE能够在不降低基线准确性的情况下实现可控的、语义上有意义的预测。我们的结果表明,偏好监督是一种经济有效的方式来增强基于采样的生成模型。
🔬 方法详解
问题定义:现有轨迹预测模型在生成多样化轨迹时缺乏可控性,即无法根据特定语义属性(如速度、方向)来控制生成轨迹的特性。这使得模型难以适应自动驾驶等需要根据不同场景生成特定行为轨迹的应用。
核心思路:PrefCVAE的核心思路是利用弱监督的偏好信息,将语义属性融入到CVAE的潜在空间中。通过学习偏好对,模型能够理解不同潜在变量与特定语义属性之间的关系,从而在生成轨迹时,可以通过调整潜在变量来控制轨迹的属性。
技术框架:PrefCVAE基于条件变分自编码器(CVAE)。它包含一个编码器,将输入轨迹编码为潜在变量;一个解码器,将潜在变量解码为预测轨迹。关键在于,PrefCVAE引入了偏好学习模块,该模块利用弱标记的偏好对(例如,轨迹A比轨迹B速度更快)来训练模型,使得潜在变量能够反映轨迹的语义属性。
关键创新:PrefCVAE的关键创新在于使用弱偏好对齐来控制生成轨迹。与传统的CVAE相比,PrefCVAE不需要显式的属性标签,而是通过学习偏好关系来隐式地学习属性。这种方法更加灵活,也更容易获取训练数据。
关键设计:PrefCVAE的关键设计包括:1) 使用对比损失函数来学习偏好关系,鼓励模型将具有相似属性的轨迹映射到潜在空间中相近的位置;2) 使用KL散度正则化潜在空间,保证潜在空间的连续性和可解释性;3) 通过调整潜在变量的采样方式,可以控制生成轨迹的属性,例如,通过增加与速度相关的潜在变量的值,可以生成速度更快的轨迹。
🖼️ 关键图片


📊 实验亮点
实验结果表明,PrefCVAE能够在不降低基线准确性的前提下,实现可控的轨迹预测。例如,通过调整与平均速度相关的潜在变量,可以显著改变生成轨迹的平均速度,同时保持轨迹的合理性和多样性。PrefCVAE在轨迹预测任务中表现出良好的性能,证明了偏好监督在增强生成模型方面的有效性。
🎯 应用场景
PrefCVAE可应用于自动驾驶、机器人导航等领域。在自动驾驶中,可以根据不同驾驶场景(如高速公路、城市道路)生成具有不同行为特征的轨迹,从而提高自动驾驶系统的安全性和适应性。在机器人导航中,可以根据任务需求生成不同类型的运动轨迹,例如,快速到达目标点或避开障碍物。
📄 摘要(原文)
Deep generative models such as conditional variational autoencoders (CVAEs) have shown great promise for predicting trajectories of surrounding agents in autonomous vehicle planning. State-of-the-art models have achieved remarkable accuracy in such prediction tasks. Besides accuracy, diversity is also crucial for safe planning because human behaviors are inherently uncertain and multimodal. However, existing methods generally lack a scheme to generate controllably diverse trajectories, which is arguably more useful than randomly diversified trajectories, to the end of safe planning. To address this, we propose PrefCVAE, an augmented CVAE framework that uses weakly labeled preference pairs to imbue latent variables with semantic attributes. Using average velocity as an example attribute, we demonstrate that PrefCVAE enables controllable, semantically meaningful predictions without degrading baseline accuracy. Our results show the effectiveness of preference supervision as a cost-effective way to enhance sampling-based generative models.