Learning to Throw-Flip
作者: Yang Liu, Bruno Da Costa, Aude Billard
分类: cs.RO, cs.LG
发布日期: 2025-10-11
备注: Accepted to IROS 2025. Video Summary: https://youtu.be/txYc9b1oflU
💡 一句话要点
提出一种新方法以实现机器人精确投掷和翻转物体
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱八:物理动画 (Physics-based Animation)
关键词: 动态操控 机器人投掷 物体翻转 冲量-动量原理 物理模型 回归学习 样本复杂度 物流自动化
📋 核心要点
- 现有方法主要关注物体的落地点,而忽视了物体的最终朝向,导致投掷精度不足。
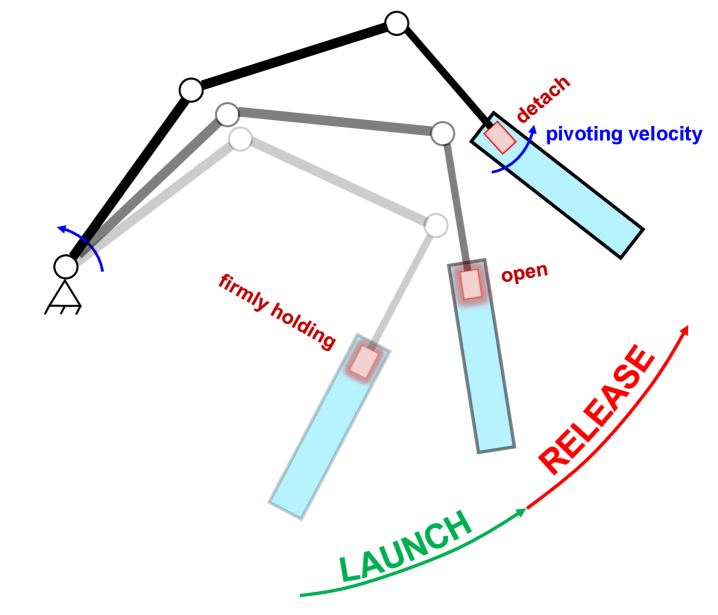
- 提出的方法通过冲量-动量原理设计投掷动作,解耦寄生旋转,结合物理模型与学习方法,提升投掷精度。
- 实验结果显示,框架能够在(±5 cm,±45度)范围内实现目标姿态,样本复杂度降低40%,学习速度提升70%。
📝 摘要(中文)
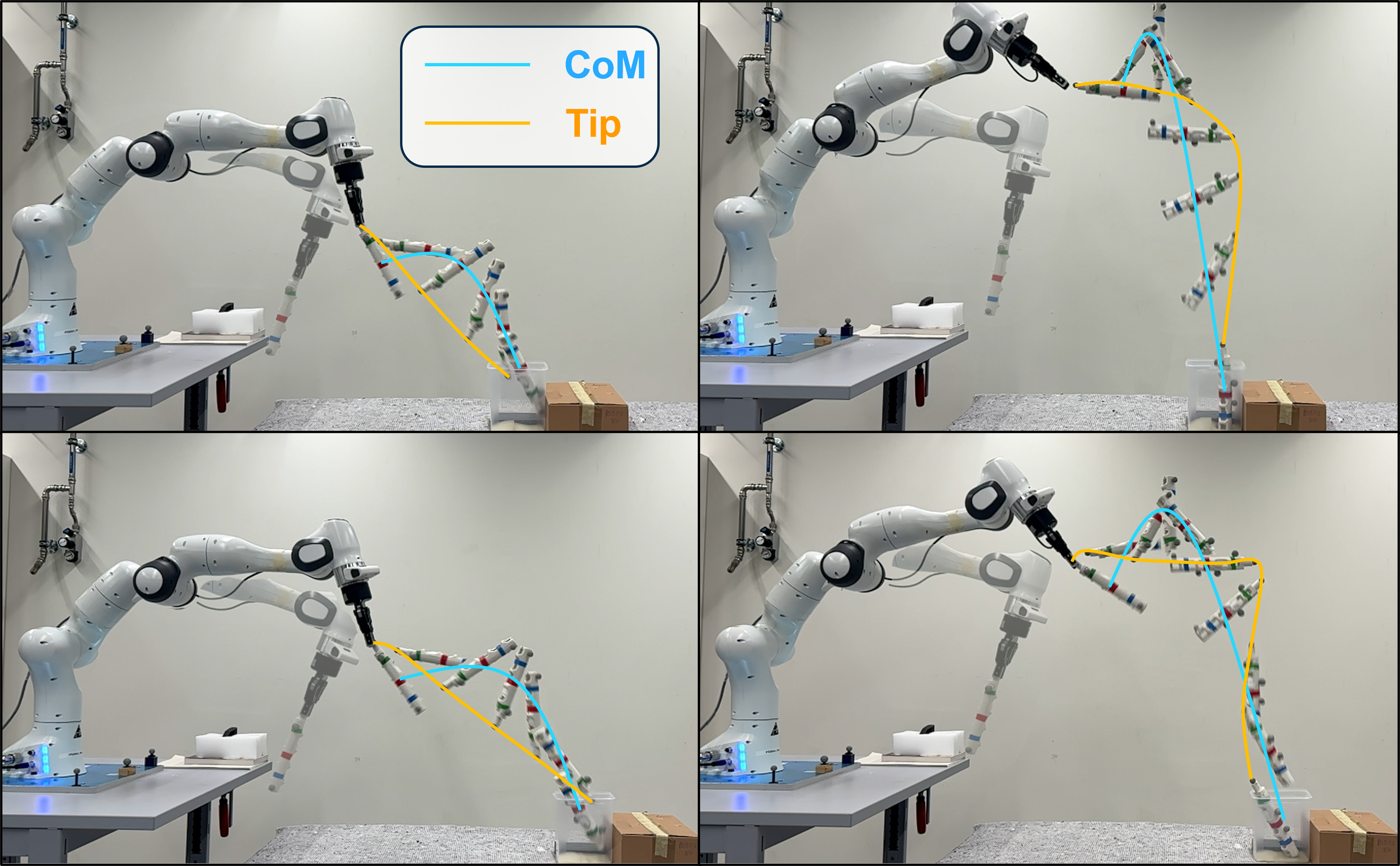
动态操控,如机器人投掷物体,近年来受到关注,成为加速物流操作的新范式。然而,现有研究主要集中在物体的落地点,而忽视了最终的朝向。本文提出了一种方法,使机器人能够准确地将物体“投掷翻转”至期望的落姿(位置和朝向)。传统上,由于关节机器人投掷物体时存在寄生旋转,导致落姿受限且难以控制。我们的方案基于两个关键设计选择:首先,利用冲量-动量原理,设计了一系列投掷动作,有效解耦寄生旋转,显著扩展可行的落姿集合;其次,结合物理模型与基于回归的学习方法,考虑未建模的影响。实际实验表明,该框架能够在数十次试验中将物体投掷翻转至目标姿态,误差在(±5 cm,±45度)范围内。通过数据同化,结合抛射动力学,样本复杂度平均降低40%。此外,利用已有的手中物体旋转知识,投掷新物体时学习速度加快70%。
🔬 方法详解
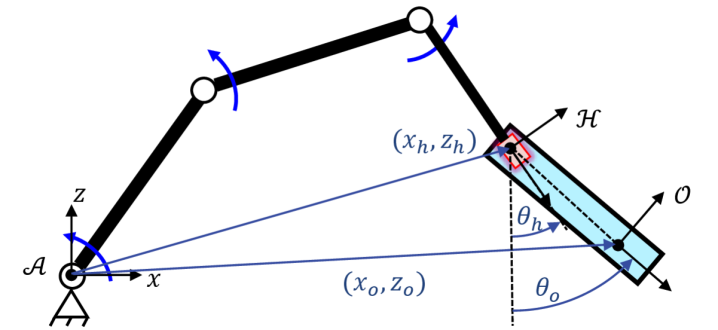
问题定义:本研究旨在解决机器人在投掷物体时,如何同时控制物体的落地点和朝向的问题。现有方法由于寄生旋转的影响,导致物体的落姿受限且难以控制。
核心思路:论文提出通过冲量-动量原理设计一系列投掷动作,旨在有效解耦寄生旋转,从而扩展可行的落姿集合。同时,结合物理模型与回归学习方法,考虑未建模的影响,以提高投掷精度。
技术框架:整体框架包括两个主要模块:首先是基于物理模型的投掷动作设计,其次是基于回归学习的动态调整。通过这两个模块的结合,形成一个完整的投掷翻转系统。
关键创新:最重要的技术创新在于通过冲量-动量原理有效解耦寄生旋转,这与现有方法的本质区别在于不再单纯依赖于物体的落地点,而是同时考虑了物体的朝向。
关键设计:在参数设置上,采用了特定的损失函数来优化投掷动作,并设计了适应性的网络结构,以便于处理不同物体的投掷需求。
🖼️ 关键图片
📊 实验亮点
实验结果表明,所提出的方法能够在(±5 cm,±45度)范围内实现目标姿态,样本复杂度平均降低40%。此外,利用已有的物体旋转知识,学习速度提升70%,显示出显著的性能优势。
🎯 应用场景
该研究的潜在应用领域包括物流自动化、仓储管理和机器人竞技等。通过提高机器人投掷物体的精度和效率,可以显著提升物流操作的速度和准确性,具有重要的实际价值和未来影响。
📄 摘要(原文)
Dynamic manipulation, such as robot tossing or throwing objects, has recently gained attention as a novel paradigm to speed up logistic operations. However, the focus has predominantly been on the object's landing location, irrespective of its final orientation. In this work, we present a method enabling a robot to accurately "throw-flip" objects to a desired landing pose (position and orientation). Conventionally, objects thrown by revolute robots suffer from parasitic rotation, resulting in highly restricted and uncontrollable landing poses. Our approach is based on two key design choices: first, leveraging the impulse-momentum principle, we design a family of throwing motions that effectively decouple the parasitic rotation, significantly expanding the feasible set of landing poses. Second, we combine a physics-based model of free flight with regression-based learning methods to account for unmodeled effects. Real robot experiments demonstrate that our framework can learn to throw-flip objects to a pose target within ($\pm$5 cm, $\pm$45 degrees) threshold in dozens of trials. Thanks to data assimilation, incorporating projectile dynamics reduces sample complexity by an average of 40% when throw-flipping to unseen poses compared to end-to-end learning methods. Additionally, we show that past knowledge on in-hand object spinning can be effectively reused, accelerating learning by 70% when throwing a new object with a Center of Mass (CoM) shift. A video summarizing the proposed method and the hardware experiments is available at https://youtu.be/txYc9b1oflU.