Real-time Mixed-Integer Quadratic Programming for Driving Behavior-Inspired Speed Bump Optimal Trajectory Planning
作者: Van Nam Dinh, Van Vy Phan, Thai Son Dang, Van Du Phan, The Anh Mai, Van Chuong Le, Sy Phuong Ho, Dinh Tu Duong, Hung Cuong Ta
分类: cs.RO
发布日期: 2025-10-10
期刊: The International Conference on Artificial Intelligence and Computational Intelligence, 2025
💡 一句话要点
提出基于MIQP的速度凸起最优轨迹规划方法,提升自动驾驶车辆舒适性
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 自动驾驶 轨迹规划 混合整数二次规划 模型预测控制 减速带 舒适性 实时性 城市环境
📋 核心要点
- 现有自动驾驶车辆在通过减速带时,难以兼顾舒适性和效率,常常导致剧烈颠簸。
- 该论文提出一种基于MIQP的轨迹规划方法,模拟人类驾驶行为,优化车辆通过减速带的轨迹。
- 仿真结果表明,该方法能够在保证计算效率的同时,实现平稳的速度过渡,提升乘客舒适度。
📝 摘要(中文)
本文提出了一种用于自动驾驶车辆轨迹规划的新方法,旨在解决在统一的混合整数二次规划(MIQP)框架内应对减速带的复杂挑战。通过利用模型预测控制(MPC),我们开发了优化减速带通过和整体乘客舒适度的轨迹。这项工作的一个关键贡献是构建了模拟人类驾驶行为的减速带处理约束,并将这些约束与更广泛的道路导航要求无缝集成。通过在各种城市驾驶环境中进行的大量仿真,我们证明了该方法的有效性,突出了其在保持适合实时部署的计算效率的同时,确保在减速带上平稳速度过渡的能力。该方法能够处理静态道路特征和动态约束,以及专家人类驾驶,代表了城市轨迹规划的重大进步。
🔬 方法详解
问题定义:论文旨在解决自动驾驶车辆在城市环境中通过减速带时的轨迹规划问题。现有方法通常难以在保证乘客舒适性的同时,维持计算效率,并且缺乏对人类驾驶行为的有效模仿,导致车辆通过减速带时体验不佳。
核心思路:论文的核心思路是利用混合整数二次规划(MIQP)框架,将减速带处理约束建模为模仿人类驾驶行为的优化问题。通过模型预测控制(MPC),在满足道路导航要求的同时,优化车辆通过减速带的轨迹,从而提升乘客舒适度。
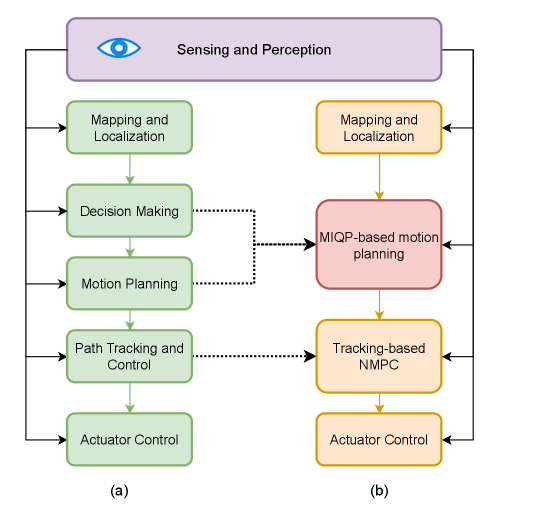
技术框架:该方法基于MPC框架,主要包含以下模块:1) 环境感知模块,用于获取道路信息和减速带位置;2) 轨迹规划模块,利用MIQP优化车辆轨迹,该模块是核心;3) 控制执行模块,将规划的轨迹转化为车辆控制指令。整个流程是一个闭环控制过程,不断根据环境变化调整车辆轨迹。
关键创新:最重要的技术创新点在于减速带处理约束的建模方式,该约束能够有效模仿人类驾驶员在通过减速带时的行为模式,例如提前减速、平稳过渡等。与传统的基于几何或动力学模型的轨迹规划方法相比,该方法更注重乘客的舒适性。
关键设计:论文的关键设计包括:1) MIQP优化问题的目标函数,需要同时考虑车辆的平稳性、速度限制和舒适度;2) 减速带处理约束的具体形式,需要根据人类驾驶行为进行调整;3) MPC的预测时域和控制频率,需要在计算效率和控制精度之间进行权衡。
🖼️ 关键图片


📊 实验亮点
论文通过在各种城市驾驶环境中进行的大量仿真实验,验证了所提出方法的有效性。实验结果表明,该方法能够在保证计算效率的前提下,实现平稳的速度过渡,显著提升乘客的舒适度。具体的性能数据(例如,颠簸程度的降低百分比)和对比基线(例如,传统的轨迹规划方法)在论文中进行了详细的展示。
🎯 应用场景
该研究成果可应用于自动驾驶出租车、自动驾驶物流车等多种场景,尤其是在城市道路环境下,能够显著提升乘客的乘坐体验。此外,该方法还可以扩展到其他道路障碍物的处理,例如坑洼路面、施工区域等,具有广阔的应用前景和实际价值。未来,该研究有望推动自动驾驶技术的进一步发展,使其更加安全、舒适和智能。
📄 摘要(原文)
This paper proposes a novel methodology for trajectory planning in autonomous vehicles (AVs), addressing the complex challenge of negotiating speed bumps within a unified Mixed-Integer Quadratic Programming (MIQP) framework. By leveraging Model Predictive Control (MPC), we develop trajectories that optimize both the traversal of speed bumps and overall passenger comfort. A key contribution of this work is the formulation of speed bump handling constraints that closely emulate human driving behavior, seamlessly integrating these with broader road navigation requirements. Through extensive simulations in varied urban driving environments, we demonstrate the efficacy of our approach, highlighting its ability to ensure smooth speed transitions over speed bumps while maintaining computational efficiency suitable for real-time deployment. The method's capability to handle both static road features and dynamic constraints, alongside expert human driving, represents a significant step forward in trajectory planning for urban