Dynamic Quadrupedal Legged and Aerial Locomotion via Structure Repurposing
作者: Chenghao Wang, Kaushik Venkatesh Krishnamurthy, Shreyansh Pitroda, Adarsh Salagame, Ioannis Mandralis, Eric Sihite, Alireza Ramezani, Morteza Gharib
分类: cs.RO
发布日期: 2025-10-10
💡 一句话要点
提出一种基于结构重用的动态四足腿式与空中混合运动机器人
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 多模态机器人 四足机器人 腿式运动 空中运动 结构重用
📋 核心要点
- 多模态机器人需要在不同运动模式间权衡,现有方法难以有效集成不同模式的需求。
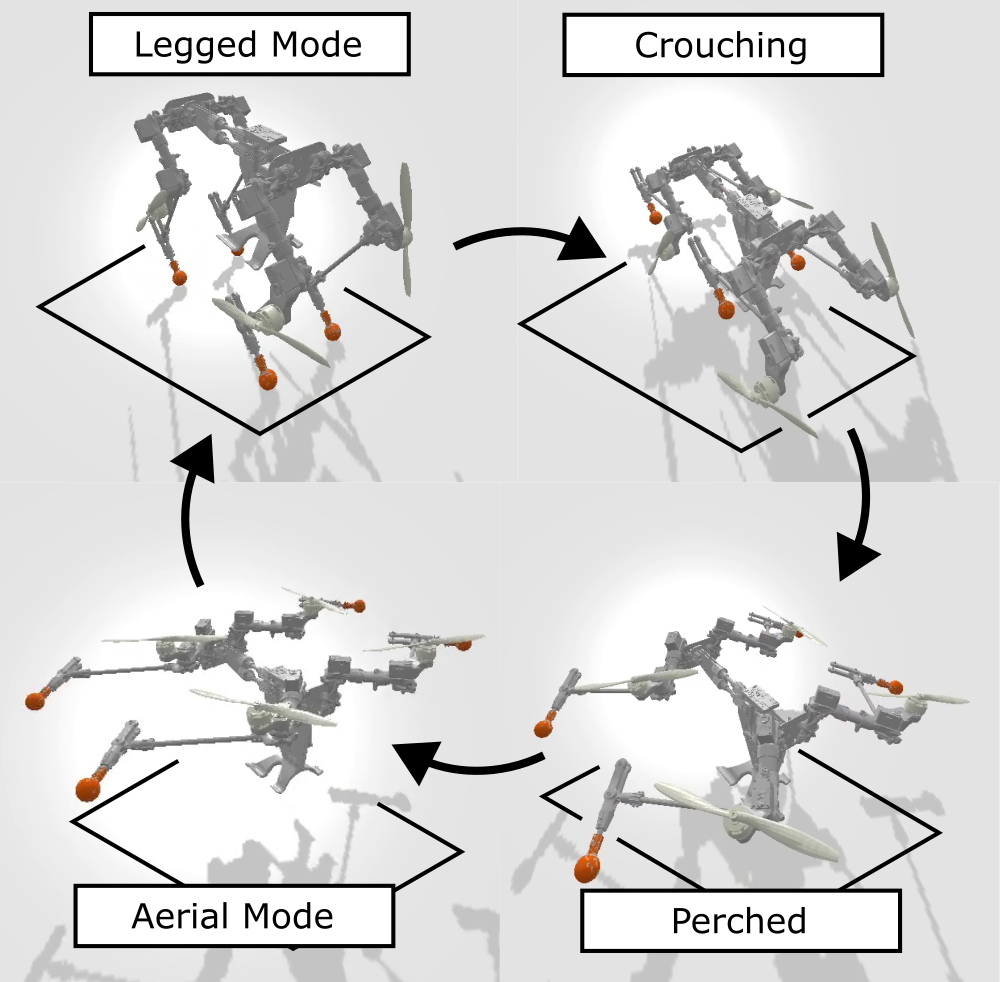
- Husky v.2通过结构重用,将腿部结构同时用于动态腿式运动和飞行,实现多模态运动。
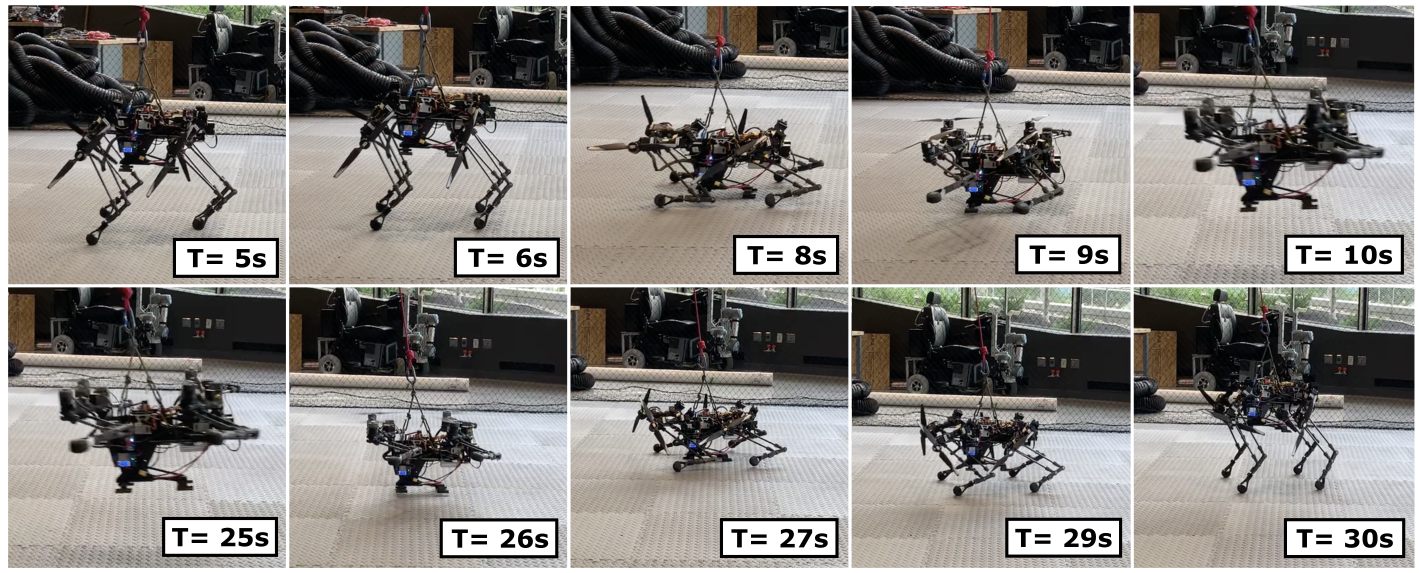
- 论文展示了Husky v.2的硬件设计,并验证了其在动态四足运动和悬停方面的能力。
📝 摘要(中文)
多模态地面-空中机器人研究广泛,但不同模式操作间的冲突需求集成是一大挑战。东北大学开发的Husky机器人家族,特别是本文讨论的Husky v.2,通过姿态控制和推力矢量,利用结构重用实现了多模态运动。该四足机器人具有可用于动态腿式运动和飞行的腿部结构。本文介绍了该机器人的硬件设计,并报告了动态四足腿式运动和悬停的主要结果。
🔬 方法详解
问题定义:现有地面-空中机器人难以有效集成不同运动模式的需求,例如,腿式运动需要高扭矩关节和稳定的地面接触,而飞行则需要轻量化设计和高效的推进系统。这些需求往往相互冲突,导致机器人性能受限。
核心思路:论文的核心思路是结构重用,即利用同一套硬件结构,通过不同的控制策略和姿态调整,实现不同的运动模式。具体而言,机器人的腿部结构既可以用于腿式运动,也可以通过调整姿态和控制推力,用于飞行。
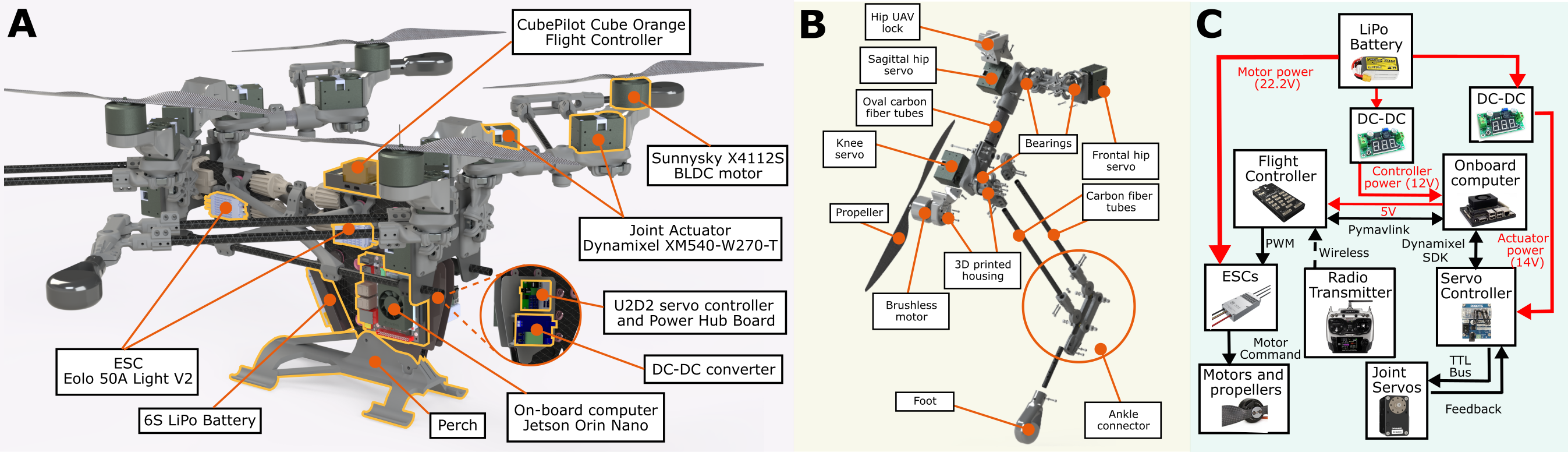
技术框架:该研究主要关注机器人的硬件设计和初步的运动控制实验。整体框架包括:1) 硬件设计:设计具有足够强度和灵活性的腿部结构,使其既能承受腿式运动的冲击,又能提供飞行所需的推力;2) 运动控制:开发相应的控制算法,实现动态四足腿式运动和悬停;3) 实验验证:通过实验验证机器人在不同运动模式下的性能。
关键创新:该研究的关键创新在于将结构重用的思想应用于地面-空中机器人,通过巧妙的硬件设计和控制策略,实现了多模态运动的集成。与传统的多模态机器人相比,该方法避免了复杂的机构切换和额外的硬件负担。
关键设计:论文重点介绍了Husky v.2的硬件设计,包括腿部结构的材料选择、关节的配置和推进系统的集成。控制方面,论文展示了初步的动态四足运动和悬停实验结果,但未提供详细的控制算法参数设置和损失函数等技术细节。这些细节有待进一步的研究和完善。
🖼️ 关键图片
📊 实验亮点
论文展示了Husky v.2机器人在动态四足腿式运动和悬停方面的初步实验结果。虽然论文没有提供具体的性能数据和对比基线,但这些实验验证了结构重用方法的可行性,为多模态机器人的设计和控制提供了新的思路。未来的研究可以进一步优化硬件设计和控制算法,提高机器人在不同运动模式下的性能。
🎯 应用场景
该研究成果可应用于搜索救援、环境监测、物流运输等领域。例如,在复杂地形或室内环境中,机器人可以利用腿式运动进行灵活移动,而在开阔区域,则可以切换到飞行模式,实现快速移动和广域覆盖。未来,该技术有望推动多模态机器人在实际场景中的应用。
📄 摘要(原文)
Multi-modal ground-aerial robots have been extensively studied, with a significant challenge lying in the integration of conflicting requirements across different modes of operation. The Husky robot family, developed at Northeastern University, and specifically the Husky v.2 discussed in this study, addresses this challenge by incorporating posture manipulation and thrust vectoring into multi-modal locomotion through structure repurposing. This quadrupedal robot features leg structures that can be repurposed for dynamic legged locomotion and flight. In this paper, we present the hardware design of the robot and report primary results on dynamic quadrupedal legged locomotion and hovering.