Placeit! A Framework for Learning Robot Object Placement Skills
作者: Amina Ferrad, Johann Huber, François Hélénon, Julien Gleyze, Mahdi Khoramshahi, Stéphane Doncieux
分类: cs.RO, cs.LG
发布日期: 2025-10-10
备注: 8 pages, 8 figures. Draft version
💡 一句话要点
Placeit!:用于学习机器人物体放置技能的进化计算框架
🎯 匹配领域: 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 机器人 物体放置 进化计算 质量-多样性优化 仿真 数据生成 抓取和放置
📋 核心要点
- 现有机器人物体放置方法缺乏大规模高质量数据,手动标注成本高昂,限制了模型泛化能力。
- Placeit! 采用进化计算框架,自动生成多样化的有效放置姿势,无需人工干预,降低数据获取成本。
- 实验表明,Placeit! 优于现有方法,并在真实机器人部署中达到 90% 的成功率,验证了其有效性。
📝 摘要(中文)
机器人研究在学习方面取得了显著进展,但掌握物体放置等基本技能仍然是一个根本性的挑战。一个关键瓶颈是获取大规模、高质量的数据,这通常是一个手动且费力的过程。受到 Graspit! 的启发,Placeit! 是一个进化计算框架,用于生成刚性物体的有效放置位置。Placeit! 用途广泛,支持从在桌子上放置物体到堆叠和插入物体等任务。实验表明,通过利用质量-多样性优化,Placeit! 在所有场景中都显著优于最先进的方法,从而生成多样化的有效姿势。基于 Placeit! 构建的抓取和放置流程在 120 次真实部署中实现了 90% 的成功率。这项工作将 Placeit! 定位为开放环境抓取和放置任务的强大工具,并作为生成训练基于仿真的机器人基础模型所需数据的宝贵引擎。
🔬 方法详解
问题定义:论文旨在解决机器人物体放置任务中,缺乏大规模、高质量训练数据的问题。现有方法依赖人工标注或特定环境下的规则设计,难以泛化到复杂场景和多样化的物体类型。因此,如何自动生成有效且多样化的放置姿势,成为提升机器人放置技能的关键挑战。
核心思路:论文的核心思路是借鉴 Graspit! 的成功经验,利用进化计算自动探索和优化放置姿势。通过模拟环境中的物理交互,评估放置姿势的有效性,并利用质量-多样性优化算法,鼓励生成更多样化的可行解。这种方法避免了人工标注的繁琐,并能够适应不同的物体和环境。
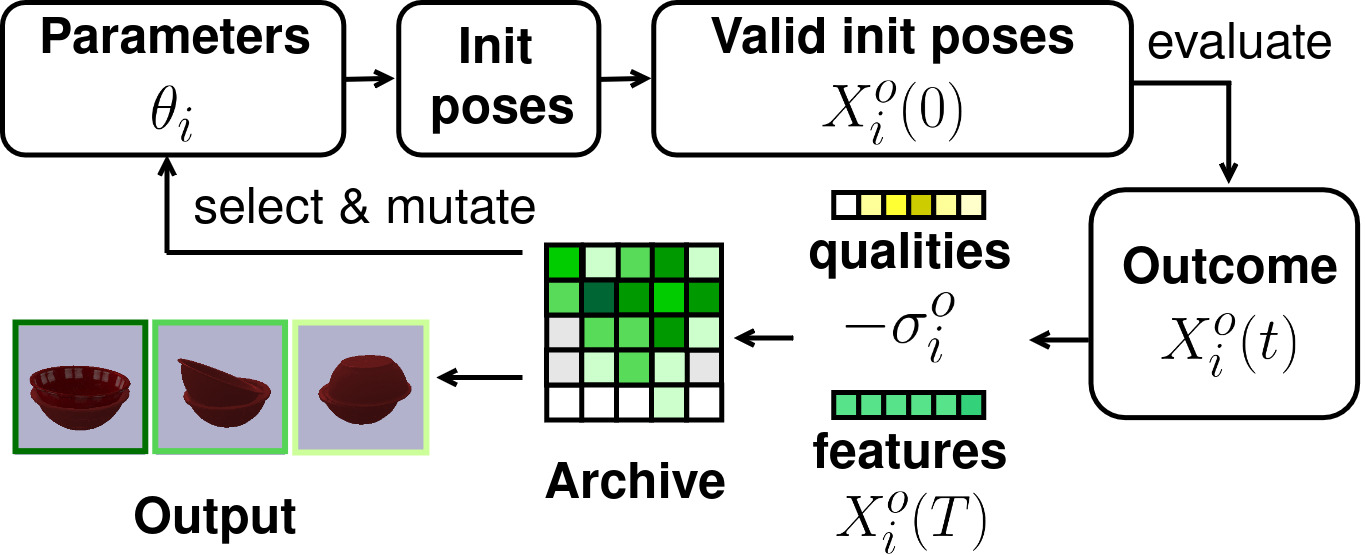
技术框架:Placeit! 的整体框架包含以下几个主要模块:1) 姿势生成器:随机生成初始的物体放置姿势。2) 物理引擎:模拟物体在给定姿势下的物理交互,例如碰撞检测、稳定性评估等。3) 适应度函数:评估放置姿势的有效性,例如是否发生碰撞、是否稳定等。4) 质量-多样性优化器:根据适应度函数的结果,选择和变异优秀的姿势,并鼓励生成更多样化的姿势。5) 数据集生成器:将优化后的姿势及其对应的标签(例如是否有效)保存到数据集中。
关键创新:Placeit! 的关键创新在于将进化计算和质量-多样性优化应用于机器人物体放置任务。与传统的基于规则或人工标注的方法相比,Placeit! 能够自动生成大规模、多样化的训练数据,从而提升机器人的泛化能力。此外,Placeit! 的框架具有很强的通用性,可以应用于不同的物体类型和环境。
关键设计:Placeit! 使用了质量-多样性优化算法 MAP-Elites 来鼓励生成多样化的放置姿势。适应度函数的设计考虑了多个因素,包括碰撞检测、稳定性评估和任务特定约束。例如,在堆叠任务中,适应度函数会考虑物体之间的相对位置和角度。此外,Placeit! 还使用了并行计算来加速进化过程。
🖼️ 关键图片


📊 实验亮点
实验结果表明,Placeit! 在生成多样化有效放置姿势方面显著优于现有方法。在真实机器人部署中,基于 Placeit! 构建的抓取和放置流程实现了 90% 的成功率,验证了其在实际应用中的有效性。此外,实验还表明,Placeit! 能够适应不同的物体类型和环境,具有很强的通用性。
🎯 应用场景
Placeit! 可应用于各种机器人应用场景,例如自动化装配、物流分拣、家庭服务等。通过自动生成高质量的训练数据,Placeit! 可以显著降低机器人学习的成本,并提升机器人在复杂环境中的适应能力。未来,Placeit! 可以作为机器人基础模型的训练引擎,推动机器人技术的进一步发展。
📄 摘要(原文)
Robotics research has made significant strides in learning, yet mastering basic skills like object placement remains a fundamental challenge. A key bottleneck is the acquisition of large-scale, high-quality data, which is often a manual and laborious process. Inspired by Graspit!, a foundational work that used simulation to automatically generate dexterous grasp poses, we introduce Placeit!, an evolutionary-computation framework for generating valid placement positions for rigid objects. Placeit! is highly versatile, supporting tasks from placing objects on tables to stacking and inserting them. Our experiments show that by leveraging quality-diversity optimization, Placeit! significantly outperforms state-of-the-art methods across all scenarios for generating diverse valid poses. A pick&place pipeline built on our framework achieved a 90% success rate over 120 real-world deployments. This work positions Placeit! as a powerful tool for open-environment pick-and-place tasks and as a valuable engine for generating the data needed to train simulation-based foundation models in robotics.