Flow-Opt: Scalable Centralized Multi-Robot Trajectory Optimization with Flow Matching and Differentiable Optimization
作者: Simon Idoko, Arun Kumar Singh
分类: cs.RO, cs.LG
发布日期: 2025-10-10
💡 一句话要点
Flow-Opt:基于流匹配和可微优化的可扩展集中式多机器人轨迹优化
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 多机器人系统 轨迹优化 流匹配 扩散模型 可微优化 安全滤波 集中式规划
📋 核心要点
- 集中式多机器人轨迹优化计算量大,难以扩展到大型机器人集群,尤其是在复杂环境中。
- Flow-Opt通过学习生成模型采样轨迹,并使用可微安全滤波器快速满足约束,显著提升计算效率。
- 实验表明,Flow-Opt能快速生成大量机器人的平滑轨迹,并支持批量处理,性能优于现有方法。
📝 摘要(中文)
本文提出Flow-Opt,一种基于学习的方法,旨在提高集中式多机器人轨迹优化的计算效率。该方法将问题分解为:首先学习一个生成模型来采样不同的候选轨迹;然后使用一个学习到的安全滤波器(SF)来确保快速的推理时约束满足。我们提出了一个带有扩散Transformer (DiT)的流匹配模型作为生成模型,并用置换不变的机器人位置和地图编码器进行增强。我们为SF开发了一个定制的求解器,并配备了一个神经网络来预测上下文相关的初始化。初始化网络以自监督的方式进行训练,利用SF求解器的可微性。我们的方法在以下方面推进了现有技术水平:在拥挤环境中,可以在几十毫秒内生成数十个机器人的轨迹,比现有的集中式优化方法快数倍;生成比基于扩散模型的基线方法更平滑的轨迹,速度快几个数量级;每个组件都可以批量处理,可以在不到一秒的时间内解决几十个问题实例。此外,我们的方法可以在给定的起点和终点位置之间生成不同的轨迹集合,从而捕获不同的避碰行为。
🔬 方法详解
问题定义:集中式多机器人轨迹优化旨在找到一组无碰撞的、平滑的轨迹,使得多个机器人能够从起始位置移动到目标位置。然而,随着机器人数量的增加,联合状态空间呈指数级增长,导致计算复杂度急剧上升,现有方法难以扩展到大型机器人集群,尤其是在狭窄和复杂的环境中。
核心思路:Flow-Opt的核心思路是将轨迹优化问题分解为两个阶段:轨迹生成和安全过滤。首先,使用一个生成模型(基于流匹配的扩散Transformer)生成多个候选轨迹。然后,使用一个学习到的安全滤波器快速评估和修正这些轨迹,以确保满足约束条件(如避免碰撞)。这种分解降低了优化问题的维度,从而提高了计算效率。
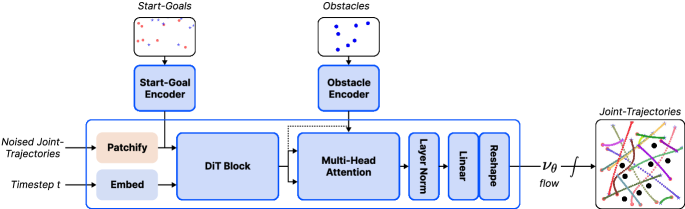
技术框架:Flow-Opt的整体框架包括以下几个主要模块:1) 轨迹生成器:基于流匹配的扩散Transformer (DiT),用于生成候选轨迹。该模型接收机器人位置和地图信息作为输入,并输出一组轨迹。2) 安全滤波器 (SF):一个定制的求解器,用于评估和修正轨迹,确保满足约束条件。3) 初始化网络:一个神经网络,用于预测SF求解器的上下文相关的初始化,以加速求解过程。该网络以自监督的方式进行训练,利用SF求解器的可微性。整个流程是先由轨迹生成器生成轨迹,然后通过安全滤波器进行过滤和优化,最终得到满足约束的轨迹。
关键创新:Flow-Opt的关键创新在于将生成模型和可微优化相结合,实现高效的轨迹优化。传统的优化方法通常需要迭代求解复杂的非线性规划问题,计算量大。Flow-Opt通过学习一个生成模型来快速生成候选轨迹,然后使用可微的安全滤波器进行快速修正,避免了复杂的迭代优化过程。此外,使用流匹配模型作为生成模型,能够生成更多样化的轨迹。
关键设计:1) 流匹配模型:使用扩散Transformer (DiT) 作为生成模型,并用置换不变的机器人位置和地图编码器进行增强,以处理多机器人场景。2) 安全滤波器:开发了一个定制的求解器,并配备了一个神经网络来预测上下文相关的初始化,以加速求解过程。3) 自监督训练:初始化网络以自监督的方式进行训练,利用SF求解器的可微性,避免了人工标注数据的需求。4) 损失函数:使用了流匹配损失函数来训练生成模型,并使用约束违反损失函数来训练安全滤波器。
🖼️ 关键图片


📊 实验亮点
Flow-Opt在拥挤环境中生成数十个机器人的轨迹的速度比现有集中式优化方法快数倍,且生成的轨迹比基于扩散模型的基线方法更平滑,速度快几个数量级。该方法支持批量处理,可以在不到一秒的时间内解决几十个问题实例。这些结果表明Flow-Opt在多机器人轨迹优化方面具有显著的性能优势。
🎯 应用场景
Flow-Opt可应用于各种多机器人协作场景,如仓库自动化、物流配送、协同搜索与救援、以及自动驾驶等。该方法能够显著提高多机器人系统在复杂环境中的规划效率和安全性,降低计算成本,并支持更大规模的机器人集群部署。未来,该技术有望推动多机器人系统在更多实际场景中的应用。
📄 摘要(原文)
Centralized trajectory optimization in the joint space of multiple robots allows access to a larger feasible space that can result in smoother trajectories, especially while planning in tight spaces. Unfortunately, it is often computationally intractable beyond a very small swarm size. In this paper, we propose Flow-Opt, a learning-based approach towards improving the computational tractability of centralized multi-robot trajectory optimization. Specifically, we reduce the problem to first learning a generative model to sample different candidate trajectories and then using a learned Safety-Filter(SF) to ensure fast inference-time constraint satisfaction. We propose a flow-matching model with a diffusion transformer (DiT) augmented with permutation invariant robot position and map encoders as the generative model. We develop a custom solver for our SF and equip it with a neural network that predicts context-specific initialization. The initialization network is trained in a self-supervised manner, taking advantage of the differentiability of the SF solver. We advance the state-of-the-art in the following respects. First, we show that we can generate trajectories of tens of robots in cluttered environments in a few tens of milliseconds. This is several times faster than existing centralized optimization approaches. Moreover, our approach also generates smoother trajectories orders of magnitude faster than competing baselines based on diffusion models. Second, each component of our approach can be batched, allowing us to solve a few tens of problem instances in a fraction of a second. We believe this is a first such result; no existing approach provides such capabilities. Finally, our approach can generate a diverse set of trajectories between a given set of start and goal locations, which can capture different collision-avoidance behaviors.