Adaptive Motion Planning via Contact-Based Intent Inference for Human-Robot Collaboration
作者: Jiurun Song, Xiao Liang, Minghui Zheng
分类: cs.RO
发布日期: 2025-10-09
💡 一句话要点
提出基于接触意图推断的自适应运动规划,用于人机协作。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 人机协作 自适应运动规划 接触意图推断 力估计 扭矩检测
📋 核心要点
- 现有的人机协作方法依赖连续动觉引导或复杂的大型语言模型,前者给操作员带来负担,后者难以保证运动规划的可靠性。
- 该论文提出一种基于接触信息的自适应运动规划框架,通过优化方法估计接触力和位置,并利用扭矩检测机制实现实时估计。
- 实验结果表明,该方法能够准确估计接触力,并有效地进行在线运动校正,从而提升人机协作的效率和安全性。
📝 摘要(中文)
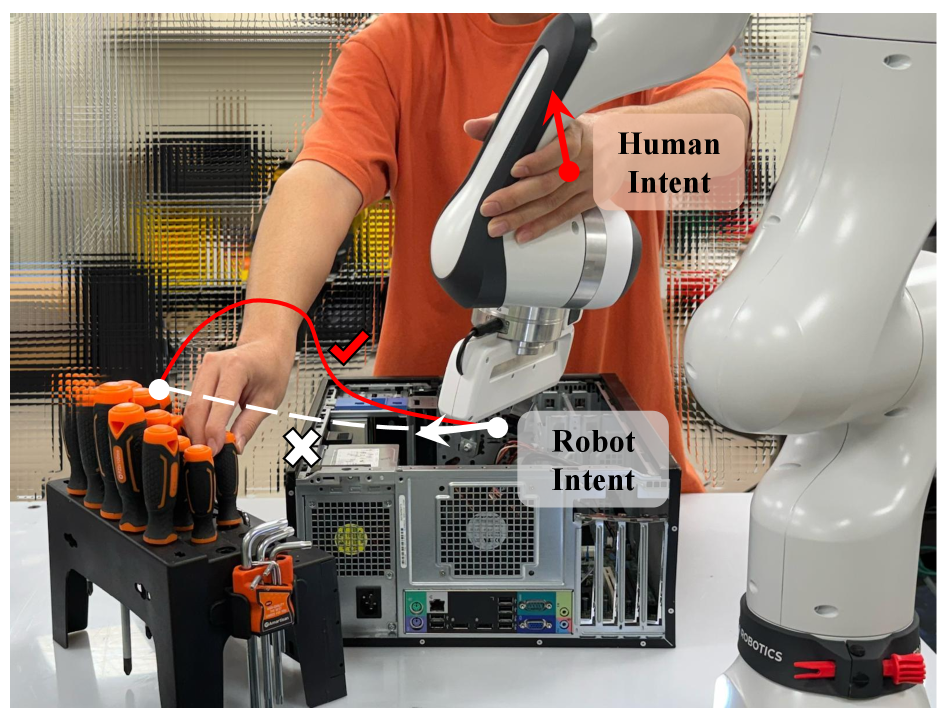
人机协作(HRC)要求机器人调整其运动以适应人类意图,从而确保在共享空间中的安全高效协作。尽管大型语言模型(LLM)为推断人类意图提供了高层次的推理能力,但将其应用于HRC中可靠的运动规划仍然具有挑战性。物理人机交互(pHRI)是直观的,但通常依赖于连续的动觉引导,这给操作员带来了负担。为了应对这些挑战,本文提出了一种基于接触信息的自适应运动规划框架,该框架直接从物理接触中推断人类意图,并将推断出的意图用于HRC中的在线运动校正。首先,提出了一种基于优化的力估计方法,从关节扭矩测量和机器人动力学模型中推断人类意图的接触力和位置,从而降低了成本和安装复杂性,同时实现了全身灵敏度。然后,引入了一种基于扭矩的接触检测机制,具有连杆级定位功能,以减少优化搜索空间并实现实时估计。随后,开发了一种基于接触信息的自适应运动规划器,以从接触中推断人类意图并在线重新规划机器人运动,同时保持平滑性并适应人类的校正。最后,在7自由度机械臂上进行了实验,证明了所提出的力估计方法的准确性以及基于接触信息的自适应运动规划器在HRC中感知不确定性下的有效性。
🔬 方法详解
问题定义:现有的人机协作方法,如依赖连续动觉引导的pHRI,对操作员造成负担。而利用LLM进行意图推断,难以保证运动规划的可靠性。因此,需要一种能够从物理接触中直接推断人类意图,并进行在线运动校正的方法。
核心思路:该论文的核心思路是通过接触信息来推断人类的意图,并利用这些意图来调整机器人的运动规划。通过优化方法估计接触力和位置,并结合扭矩检测机制,实现对人类意图的实时感知和响应。这种方法避免了对连续动觉引导的依赖,也无需复杂的LLM,从而提高了人机协作的效率和安全性。
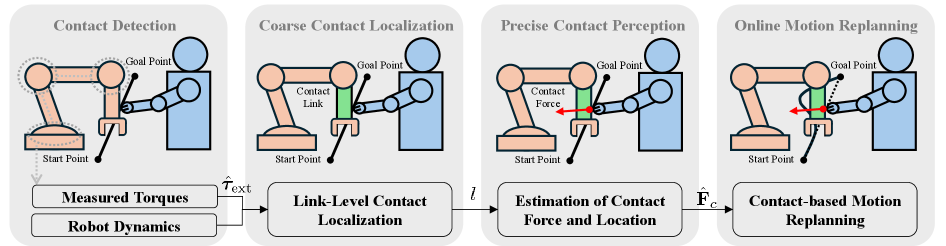
技术框架:该框架主要包含三个模块:1) 基于优化的力估计模块,用于从关节扭矩测量和机器人动力学模型中推断人类意图的接触力和位置;2) 基于扭矩的接触检测模块,用于减少优化搜索空间并实现实时估计;3) 基于接触信息的自适应运动规划器,用于从接触中推断人类意图并在线重新规划机器人运动。整体流程是:首先通过接触检测模块定位接触位置,然后利用力估计模块估计接触力,最后通过自适应运动规划器根据接触力和位置调整机器人运动。
关键创新:该论文的关键创新在于提出了一种基于接触信息的自适应运动规划框架,该框架能够直接从物理接触中推断人类意图,并利用这些意图进行在线运动校正。与现有方法相比,该方法无需连续动觉引导,也无需复杂的LLM,从而提高了人机协作的效率和安全性。此外,该论文还提出了一种基于优化的力估计方法和一种基于扭矩的接触检测机制,进一步提高了系统的性能。
关键设计:在力估计模块中,采用了基于优化的方法,通过最小化机器人动力学模型预测的扭矩与实际测量扭矩之间的差异来估计接触力和位置。在接触检测模块中,利用扭矩阈值来检测接触事件,并利用连杆级定位来缩小搜索空间。在自适应运动规划器中,采用了平滑的运动规划算法,以确保机器人运动的平稳性,并根据接触力和位置进行在线调整。
🖼️ 关键图片
📊 实验亮点
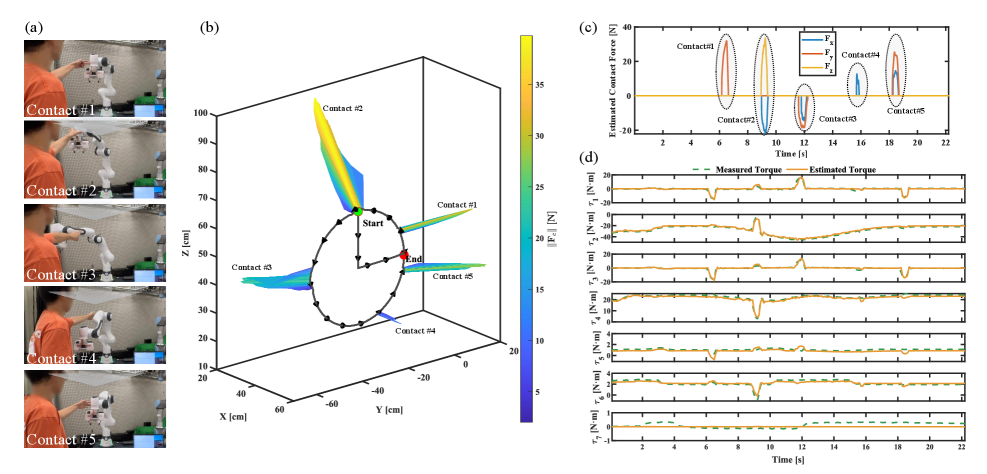
实验结果表明,所提出的力估计方法能够准确地估计接触力,从而实现精确的意图推断。此外,基于接触信息的自适应运动规划器能够有效地进行在线运动校正,即使在存在感知不确定性的情况下,也能保证人机协作的顺利进行。具体性能数据未知。
🎯 应用场景
该研究成果可应用于各种人机协作场景,例如:工业装配、医疗康复、家庭服务等。通过使机器人能够理解人类的意图并做出相应的调整,可以提高工作效率、降低操作难度,并提升安全性。未来,该技术有望与更先进的感知和控制技术相结合,实现更智能、更灵活的人机协作。
📄 摘要(原文)
Human-robot collaboration (HRC) requires robots to adapt their motions to human intent to ensure safe and efficient cooperation in shared spaces. Although large language models (LLMs) provide high-level reasoning for inferring human intent, their application to reliable motion planning in HRC remains challenging. Physical human-robot interaction (pHRI) is intuitive but often relies on continuous kinesthetic guidance, which imposes burdens on operators. To address these challenges, a contact-informed adaptive motion-planning framework is introduced to infer human intent directly from physical contact and employ the inferred intent for online motion correction in HRC. First, an optimization-based force estimation method is proposed to infer human-intended contact forces and locations from joint torque measurements and a robot dynamics model, thereby reducing cost and installation complexity while enabling whole-body sensitivity. Then, a torque-based contact detection mechanism with link-level localization is introduced to reduce the optimization search space and to enable real-time estimation. Subsequently, a contact-informed adaptive motion planner is developed to infer human intent from contacts and to replan robot motion online, while maintaining smoothness and adapting to human corrections. Finally, experiments on a 7-DOF manipulator are conducted to demonstrate the accuracy of the proposed force estimation method and the effectiveness of the contact-informed adaptive motion planner under perception uncertainty in HRC.