Whole Body Model Predictive Control for Spin-Aware Quadrupedal Table Tennis
作者: David Nguyen, Zulfiqar Zaidi, Kevin Karol, Jessica Hodgins, Zhaoming Xie
分类: cs.RO, eess.SY
发布日期: 2025-10-09
备注: Submitted to appear in IEEE ICRA 2026
💡 一句话要点
提出基于全身模型预测控制的四足机器人乒乓球系统,实现高速和自适应回球
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 四足机器人 乒乓球 模型预测控制 全身控制 轨迹预测
📋 核心要点
- 现有的腿式机器人乒乓球系统难以兼顾速度、精度和对各种旋转球的适应性,尤其是在全身协调控制方面。
- 该论文提出了一种基于模型预测控制(MPC)的全身控制方法,能够根据不同的回球目标自动生成连续的击球策略。
- 实验结果表明,该系统能够在真实的四足机器人上实现动态乒乓球,并能够与人类玩家进行对打。
📝 摘要(中文)
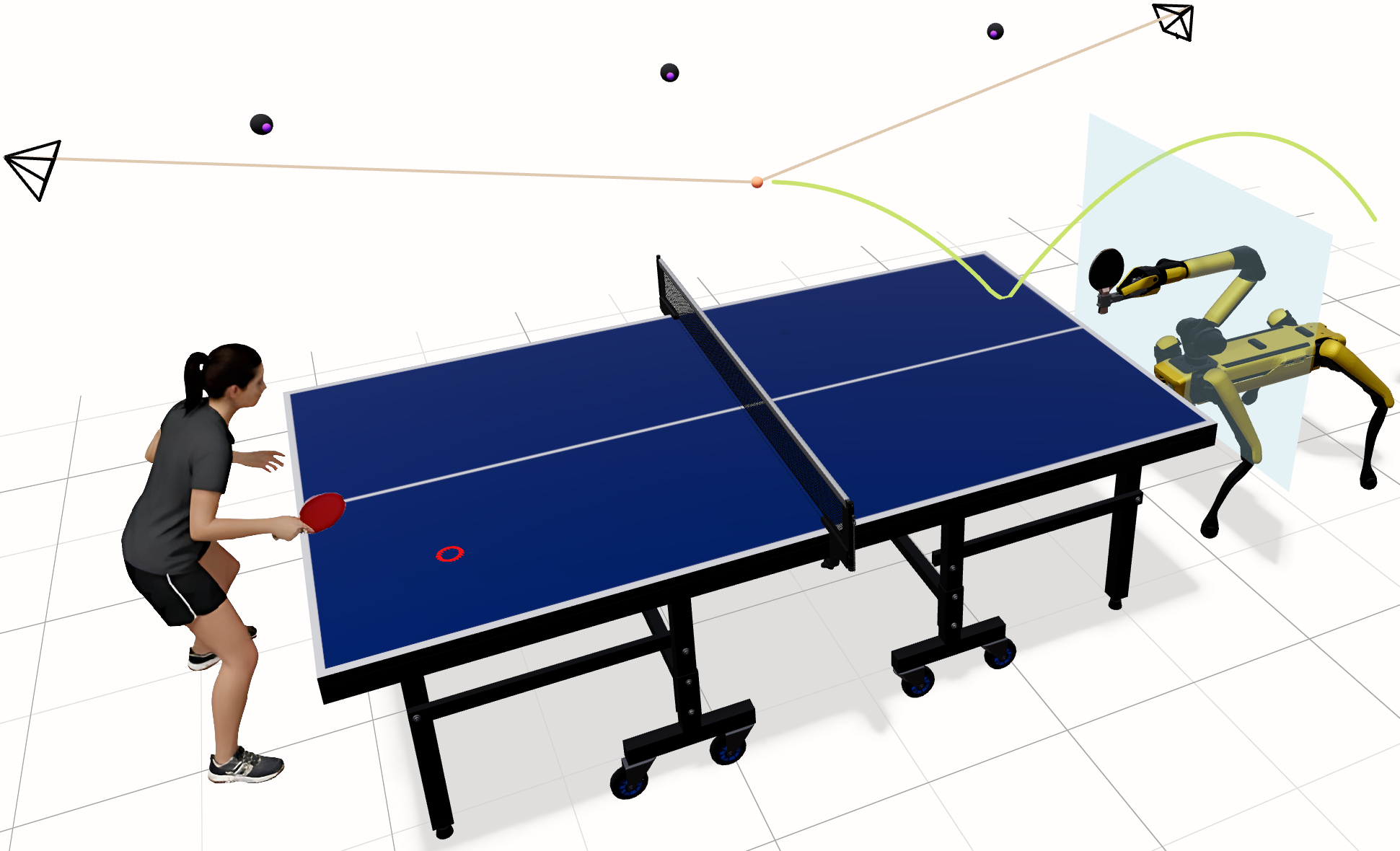
本文提出了一种用于四足机器人动态乒乓球系统,旨在达到人类的速度、准确性和预测旋转并做出反应的能力。该系统集成了高速感知、轨迹预测和敏捷控制。具体而言,系统使用外部相机进行高速球体定位,利用物理模型和学习残差来推断旋转并预测轨迹,并采用一种新颖的模型预测控制(MPC)公式来实现敏捷的全身控制。值得注意的是,通过这种控制范式,可以从不同的回球目标中自动涌现出一系列连续的击球策略。在真实的Spot四足机器人上进行了系统演示,评估了每个系统组件的准确性,并通过系统瞄准和返回具有不同旋转类型的球的能力展示了协调性。此外,该系统还能够与人类玩家进行对打。
🔬 方法详解
问题定义:现有的腿式机器人乒乓球系统在动态环境下难以达到人类的水平,尤其是在处理高速旋转球时,需要精确的感知、预测和敏捷的全身控制。现有的方法可能在速度、精度或对不同旋转的适应性方面存在不足,难以实现与人类玩家的流畅对打。
核心思路:该论文的核心思路是将感知、预测和控制三个模块紧密结合,利用高速视觉感知球的位置,通过物理模型和学习残差预测球的轨迹和旋转,并使用模型预测控制(MPC)生成全身运动指令,从而实现敏捷和自适应的回球。这种方法允许机器人根据不同的回球目标自动调整击球策略。
技术框架:该系统包含以下主要模块:1) 高速视觉感知:使用外部相机实时定位乒乓球;2) 轨迹预测:利用物理模型和学习残差估计球的旋转并预测其轨迹;3) 模型预测控制(MPC):基于预测的轨迹和期望的回球目标,生成全身运动指令,控制机器人的运动。整个流程是实时的,能够根据球的运动状态动态调整机器人的行为。
关键创新:该论文的关键创新在于提出了一种新颖的基于模型预测控制(MPC)的全身控制方法,该方法能够自动生成连续的击球策略,而无需手动设计。通过优化控制目标,机器人可以根据不同的回球需求(例如,速度、旋转、落点)自动调整其运动轨迹和击球方式。
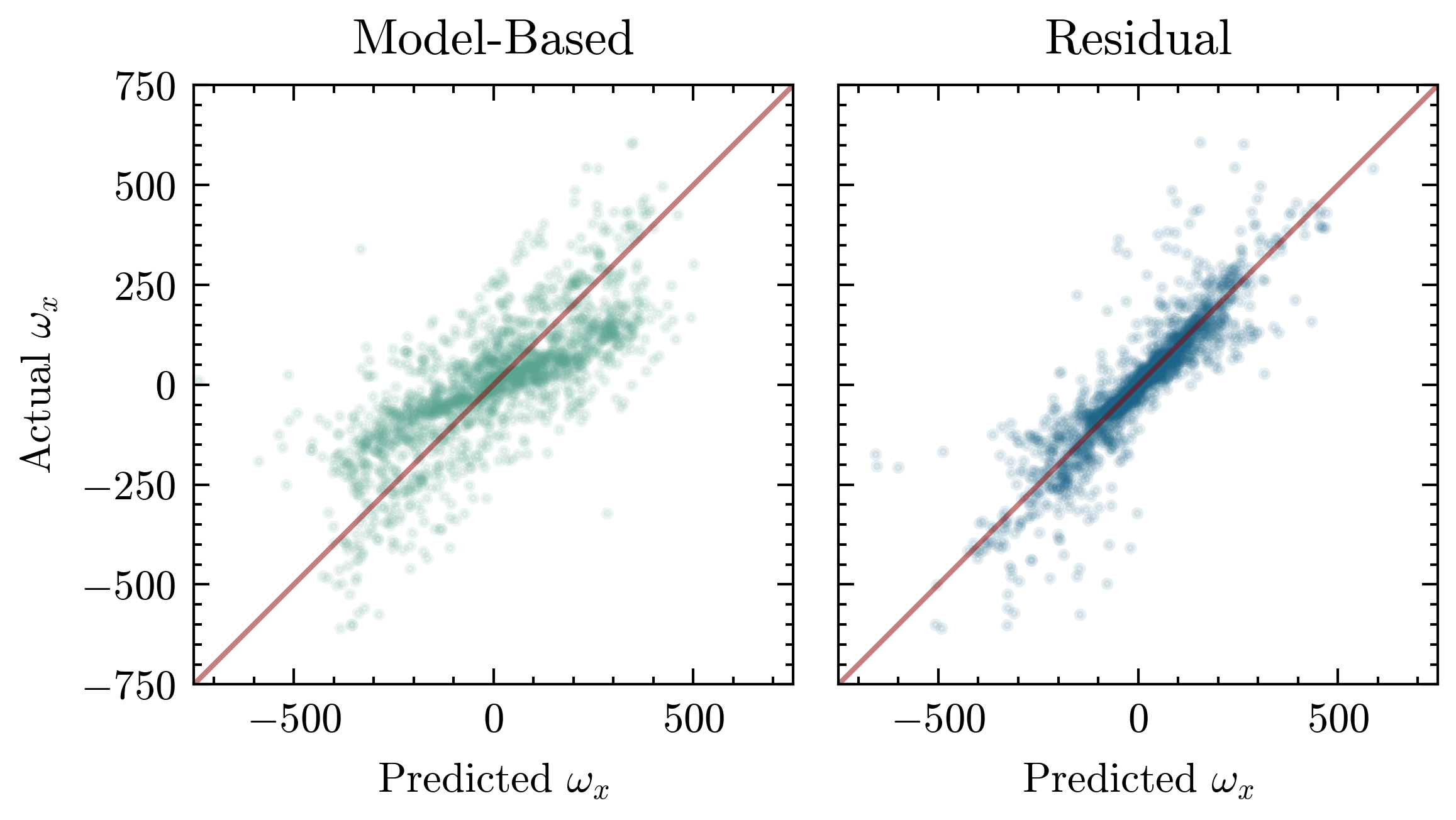
关键设计:MPC的控制目标包括跟踪期望的球拍位置和姿态,同时最小化机器人的关节力矩和运动幅度。为了提高轨迹预测的准确性,论文使用了物理模型,并通过学习残差来补偿模型误差。此外,为了实现高速控制,MPC的计算需要在短时间内完成,因此需要对优化问题进行简化和加速。
🖼️ 关键图片

📊 实验亮点
该系统在真实的Spot四足机器人上进行了实验验证,结果表明该系统能够准确地预测球的轨迹和旋转,并能够生成敏捷的全身运动指令,实现与人类玩家的对打。实验还评估了每个系统组件的准确性,并展示了系统瞄准和返回具有不同旋转类型的球的能力。
🎯 应用场景
该研究成果可应用于开发更智能、更灵活的腿式机器人,使其能够在动态环境中执行复杂任务,例如搜救、物流和人机协作。此外,该系统所采用的感知、预测和控制方法也可以推广到其他需要全身协调控制的机器人应用中,例如体操、舞蹈和运动训练。
📄 摘要(原文)
Developing table tennis robots that mirror human speed, accuracy, and ability to predict and respond to the full range of ball spins remains a significant challenge for legged robots. To demonstrate these capabilities we present a system to play dynamic table tennis for quadrupedal robots that integrates high speed perception, trajectory prediction, and agile control. Our system uses external cameras for high-speed ball localization, physical models with learned residuals to infer spin and predict trajectories, and a novel model predictive control (MPC) formulation for agile full-body control. Notably, a continuous set of stroke strategies emerge automatically from different ball return objectives using this control paradigm. We demonstrate our system in the real world on a Spot quadruped, evaluate accuracy of each system component, and exhibit coordination through the system's ability to aim and return balls with varying spin types. As a further demonstration, the system is able to rally with human players.