Probabilistically-Safe Bipedal Navigation over Uncertain Terrain via Conformal Prediction and Contraction Analysis
作者: Kasidit Muenprasitivej, Ye Zhao, Glen Chou
分类: cs.RO
发布日期: 2025-10-09
备注: 9 pages, 4 figures
💡 一句话要点
提出基于保角预测和收缩分析的概率安全双足机器人不确定地形导航方法
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱三:空间感知与语义 (Perception & Semantics)
关键词: 双足机器人 不确定地形导航 保角预测 收缩分析 模型预测控制
📋 核心要点
- 现有双足机器人导航方法难以在不确定地形下保证安全性和鲁棒性,尤其是在高程未知的情况下。
- 论文提出结合高斯过程回归、保角预测和收缩分析的方法,在高层MPC框架下实现概率安全导航。
- 通过MuJoCo仿真验证,该方法能够在不确定地形下实现Digit双足机器人的安全导航和目标可达。
📝 摘要(中文)
本文旨在解决双足机器人穿越崎岖地形的挑战,提出了一种概率安全的规划和控制策略,以确保在地形不确定性下的动态可行性和质心鲁棒性。具体而言,我们提出了一个高层模型预测控制(MPC)导航框架,该框架为双足机器人提供指定安全置信度,使其能够在具有不确定高程的地形图上安全地向期望目标位置移动,并将不确定性边界正式纳入运动控制的质心动力学中。为了对崎岖地形进行建模,我们采用高斯过程(GP)回归来估计高程图,并利用保角预测(CP)来构建校准的置信区间,以捕获真实的地形高程。在此基础上,我们构建了基于收缩的可达管,明确考虑了地形不确定性,从而确保状态收敛和管不变性。此外,我们为降阶线性倒立摆模型(LIPM)引入了一种基于收缩的飞轮扭矩控制律,该控制律稳定了关于质心(CoM)的角动量。这种公式提供了概率安全性和目标可达性保证。对于给定的置信度,我们通过证明实际CoM相空间轨迹和高层规划器规定的期望轨迹的指数稳定来建立所提出的扭矩控制律的前向不变性。最后,我们通过MuJoCo中Digit双足机器人的基于物理的仿真来评估我们的规划框架的有效性。
🔬 方法详解
问题定义:双足机器人需要在具有不确定高程信息的崎岖地形中安全导航,同时保证动态可行性和质心鲁棒性。现有方法通常假设地形信息已知或使用简单的误差界限,无法提供概率安全保证,且难以处理复杂的非线性动力学。
核心思路:利用高斯过程回归对地形进行建模,并使用保角预测方法构建地形高程的置信区间,从而量化地形的不确定性。然后,将这些不确定性纳入到基于收缩分析的运动规划和控制框架中,确保在不确定性存在的情况下,机器人状态能够收敛到期望轨迹,并保持在安全区域内。
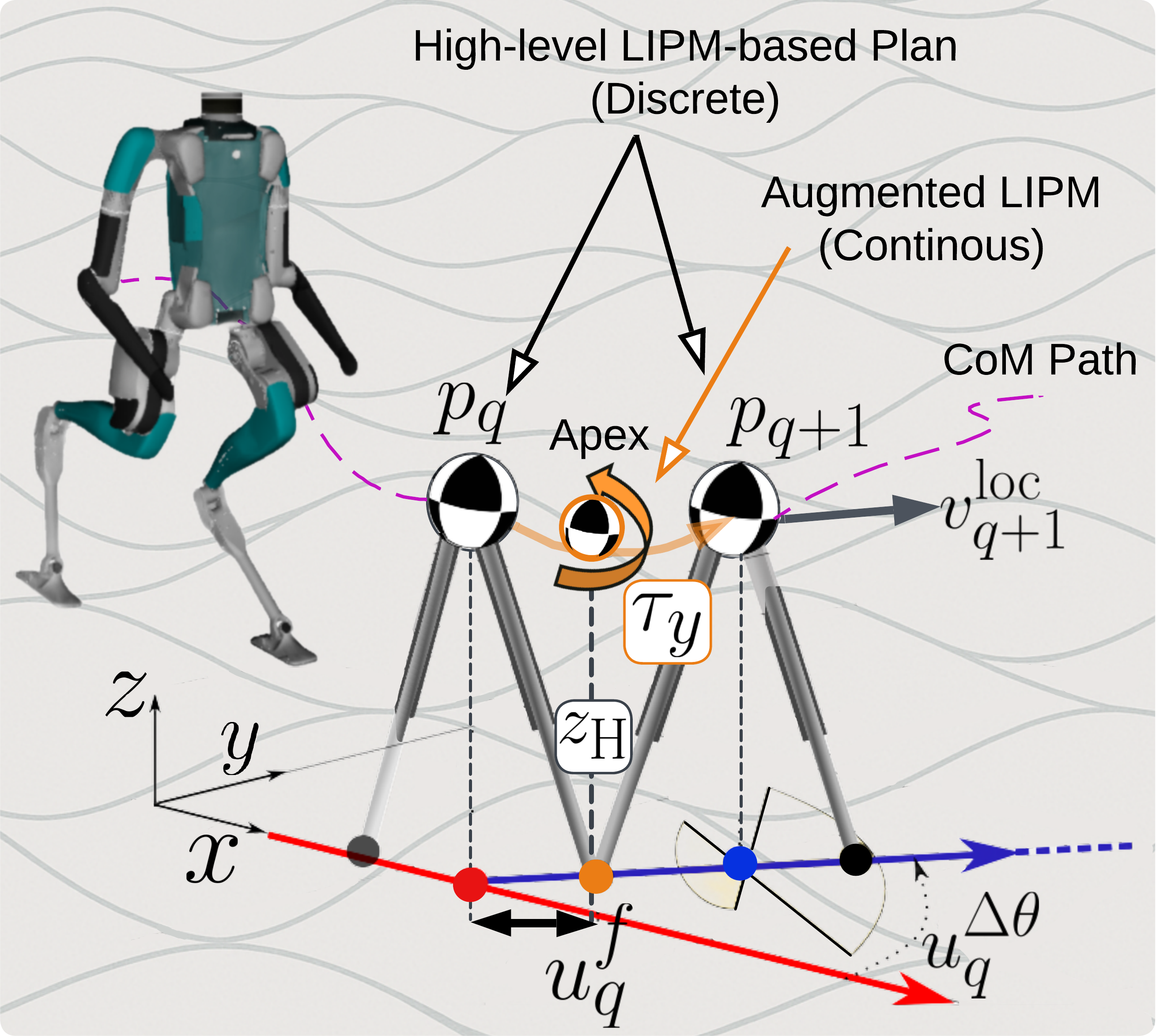
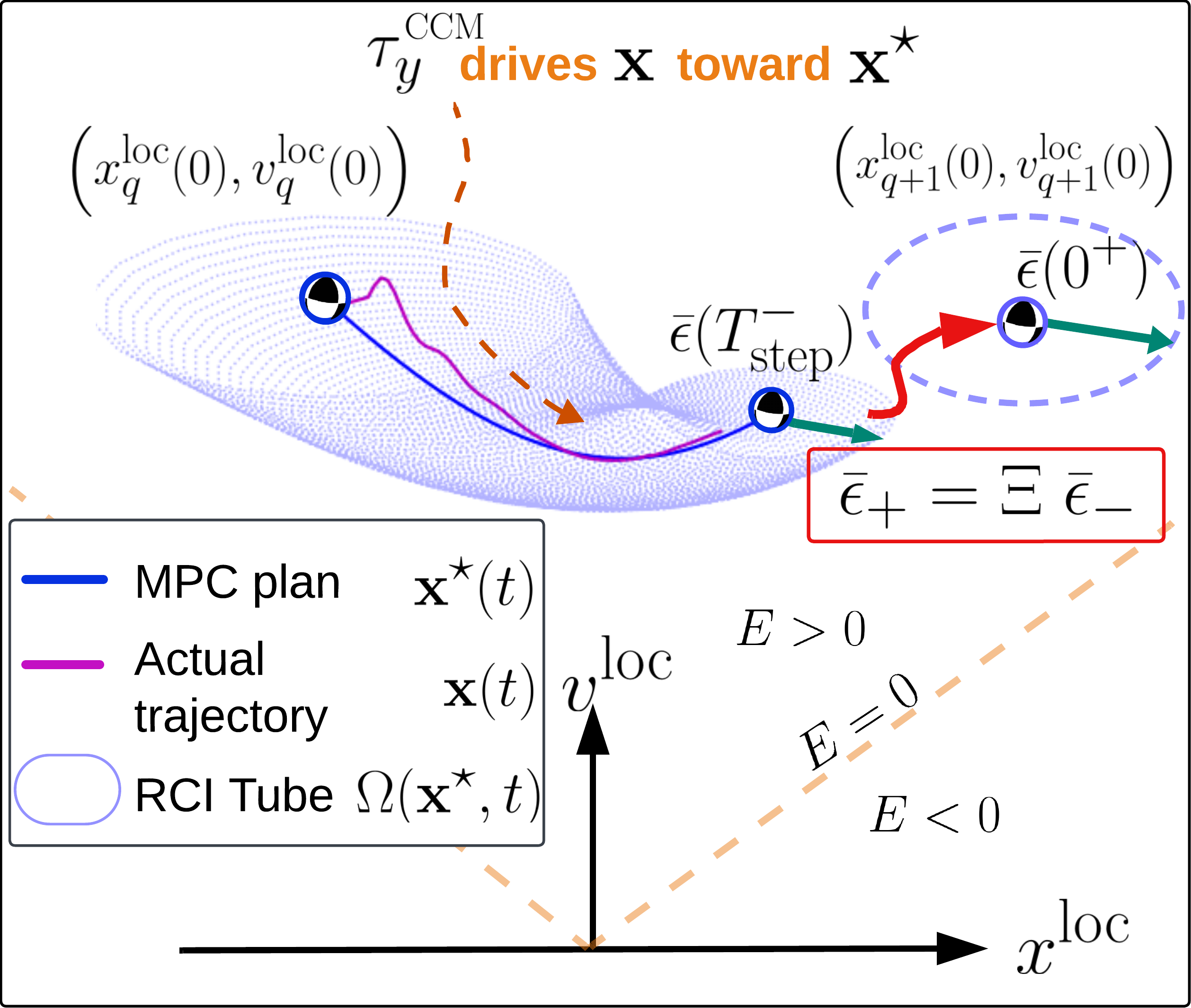
技术框架:整体框架包含三个主要模块:1) 地形建模:使用高斯过程回归估计地形高程,并利用保角预测生成置信区间。2) 高层规划:使用模型预测控制(MPC)生成参考轨迹,同时考虑地形不确定性和安全约束。3) 低层控制:设计基于收缩的飞轮扭矩控制律,稳定机器人的角动量,并跟踪高层规划器生成的参考轨迹。
关键创新:将保角预测与收缩分析相结合,为双足机器人在不确定地形中的导航提供了概率安全保证。传统的收缩分析通常假设系统动力学已知,而本文通过保角预测量化了地形的不确定性,并将其纳入到收缩分析框架中。
关键设计:高斯过程回归使用RBF核函数,保角预测采用split conformal prediction方法,MPC的目标函数包含目标跟踪误差和控制输入惩罚项,收缩分析基于线性倒立摆模型(LIPM),飞轮扭矩控制律的设计保证了CoM相空间轨迹的指数稳定。
🖼️ 关键图片

📊 实验亮点
通过MuJoCo仿真,在Digit双足机器人上验证了该方法的有效性。实验结果表明,该方法能够在具有不确定高程的地形中实现安全导航,并保证目标可达性。具体性能数据未知,但论文强调了在给定置信水平下,该方法能够提供概率安全保证。
🎯 应用场景
该研究成果可应用于搜救机器人、巡检机器人等需要在复杂和不确定环境中作业的场景。例如,在灾后救援中,机器人可以利用该方法安全地穿越瓦砾堆等复杂地形,寻找幸存者。此外,该方法还可以应用于农业机器人,使其能够在田间地头等不平整地形中稳定行走,进行农作物监测和管理。
📄 摘要(原文)
We address the challenge of enabling bipedal robots to traverse rough terrain by developing probabilistically safe planning and control strategies that ensure dynamic feasibility and centroidal robustness under terrain uncertainty. Specifically, we propose a high-level Model Predictive Control (MPC) navigation framework for a bipedal robot with a specified confidence level of safety that (i) enables safe traversal toward a desired goal location across a terrain map with uncertain elevations, and (ii) formally incorporates uncertainty bounds into the centroidal dynamics of locomotion control. To model the rough terrain, we employ Gaussian Process (GP) regression to estimate elevation maps and leverage Conformal Prediction (CP) to construct calibrated confidence intervals that capture the true terrain elevation. Building on this, we formulate contraction-based reachable tubes that explicitly account for terrain uncertainty, ensuring state convergence and tube invariance. In addition, we introduce a contraction-based flywheel torque control law for the reduced-order Linear Inverted Pendulum Model (LIPM), which stabilizes the angular momentum about the center-of-mass (CoM). This formulation provides both probabilistic safety and goal reachability guarantees. For a given confidence level, we establish the forward invariance of the proposed torque control law by demonstrating exponential stabilization of the actual CoM phase-space trajectory and the desired trajectory prescribed by the high-level planner. Finally, we evaluate the effectiveness of our planning framework through physics-based simulations of the Digit bipedal robot in MuJoCo.