EB-MBD: Emerging-Barrier Model-Based Diffusion for Safe Trajectory Optimization in Highly Constrained Environments
作者: Raghav Mishra, Ian R. Manchester
分类: cs.RO, eess.SY
发布日期: 2025-10-09
💡 一句话要点
提出EB-MBD方法,通过新兴障碍函数优化高约束环境下的安全轨迹
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 模型扩散 轨迹优化 障碍函数 约束优化 机器人 安全控制 内点法 水下机器人
📋 核心要点
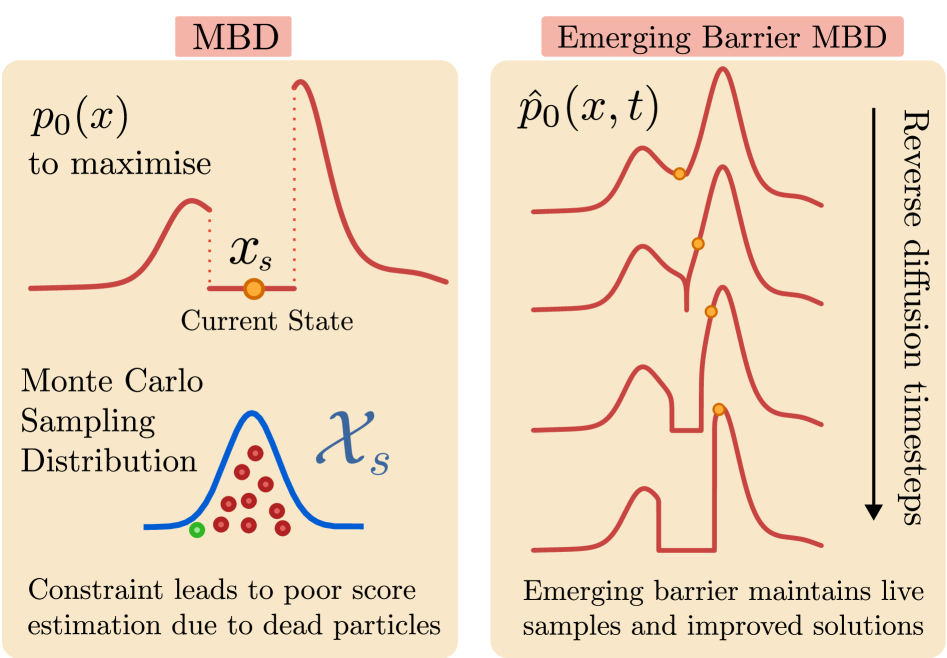
- 模型扩散方法在约束条件下性能急剧下降,源于蒙特卡洛近似分数函数时样本效率不足。
- EB-MBD通过渐进式引入障碍约束,避免了性能退化,提升了解的质量,无需高昂的投影计算。
- 实验表明,EB-MBD在2D避碰和3D水下机械臂任务中,成本低于模型扩散,计算效率远高于投影法。
📝 摘要(中文)
本文提出了一种基于新兴障碍函数的模型扩散方法(EB-MBD),用于在模型扩散中强制执行约束,其灵感来源于内点法。研究表明,由于分数函数的蒙特卡洛近似中的样本效率低下,模型扩散中的约束会导致灾难性的性能下降,即使在简单的2D系统中也是如此。EB-MBD通过逐步引入障碍约束来避免这些问题,显著提高了解决方案的质量,而无需诸如投影等计算成本高昂的操作。通过分析每次迭代中样本的采样活跃度来指导障碍参数的调度选择。在2D避碰和3D水下机械臂系统中验证了该方法,结果表明,与模型扩散相比,该方法获得了更低成本的解决方案,并且比基于投影的方法所需的计算时间少几个数量级。
🔬 方法详解
问题定义:论文旨在解决高约束环境下轨迹优化问题,现有基于模型扩散的方法在处理约束时,由于蒙特卡洛采样效率低,容易导致性能急剧下降,甚至失效。传统的投影方法虽然可以保证约束满足,但计算成本非常高,难以应用于复杂系统。
核心思路:论文的核心思路是借鉴内点法的思想,引入新兴障碍函数,将约束转化为目标函数中的惩罚项。通过逐步调整障碍函数的参数,使得轨迹逐渐逼近约束边界,最终满足约束条件。这种方法避免了直接进行投影操作,降低了计算复杂度,同时提高了采样效率。
技术框架:EB-MBD的整体框架基于模型扩散,主要包含以下几个阶段:1)初始化轨迹;2)基于模型扩散生成新的轨迹样本;3)计算每个样本的障碍函数值,并将其作为惩罚项加入到目标函数中;4)使用优化算法(如梯度下降)更新轨迹;5)根据样本的采样活跃度调整障碍函数的参数;6)重复步骤2-5,直到满足收敛条件。
关键创新:EB-MBD的关键创新在于引入了新兴障碍函数,并提出了一种基于采样活跃度的障碍参数调度策略。与传统的模型扩散方法相比,EB-MBD能够更好地处理约束,避免了性能退化。与基于投影的方法相比,EB-MBD具有更低的计算复杂度。
关键设计:障碍函数的设计是关键,论文采用了一种基于距离的障碍函数,距离越近,惩罚越大。障碍参数的调度策略基于样本的采样活跃度,活跃度越高,说明样本越接近约束边界,此时应该减小障碍参数,允许样本进一步逼近约束。目标函数由两部分组成:原始的目标函数和障碍函数惩罚项。优化算法采用梯度下降法,通过迭代更新轨迹,使其逐渐逼近最优解。
🖼️ 关键图片


📊 实验亮点
实验结果表明,EB-MBD在2D避碰和3D水下机械臂任务中,能够获得比传统模型扩散方法更低的成本,并且比基于投影的方法所需的计算时间少几个数量级。例如,在3D水下机械臂任务中,EB-MBD的计算时间比投影法减少了1-2个数量级,同时获得了更优的轨迹。
🎯 应用场景
EB-MBD方法可应用于各种需要在高约束环境下进行轨迹优化的场景,例如:机器人避障、自动驾驶、航空航天、水下机器人等。该方法能够提高轨迹优化效率,降低计算成本,并保证轨迹的安全性,具有重要的实际应用价值和潜力。
📄 摘要(原文)
We propose enforcing constraints on Model-Based Diffusion by introducing emerging barrier functions inspired by interior point methods. We show that constraints on Model-Based Diffusion can lead to catastrophic performance degradation, even on simple 2D systems due to sample inefficiency in the Monte Carlo approximation of the score function. We introduce Emerging-Barrier Model-Based Diffusion (EB-MBD) which uses progressively introduced barrier constraints to avoid these problems, significantly improving solution quality, without the need for computationally expensive operations such as projections. We analyze the sampling liveliness of samples each iteration to inform barrier parameter scheduling choice. We demonstrate results for 2D collision avoidance and a 3D underwater manipulator system and show that our method achieves lower cost solutions than Model-Based Diffusion, and requires orders of magnitude less computation time than projection based methods.