Constrained Natural Language Action Planning for Resilient Embodied Systems
作者: Grayson Byrd, Corban Rivera, Bethany Kemp, Meghan Booker, Aurora Schmidt, Celso M de Melo, Lalithkumar Seenivasan, Mathias Unberath
分类: cs.RO, cs.AI
发布日期: 2025-10-07
💡 一句话要点
提出约束自然语言动作规划方法,提升具身智能系统的可靠性与可重复性。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 具身智能 机器人规划 大型语言模型 符号规划 任务规划 约束规划 可靠性 可重复性
📋 核心要点
- 现有方法依赖LLM进行任务规划,但LLM的幻觉问题导致可靠性不足,且提示工程缺乏透明度和可重复性。
- 该论文提出一种结合LLM和符号规划的混合方法,利用符号规划的约束来增强LLM规划器的可靠性和可重复性。
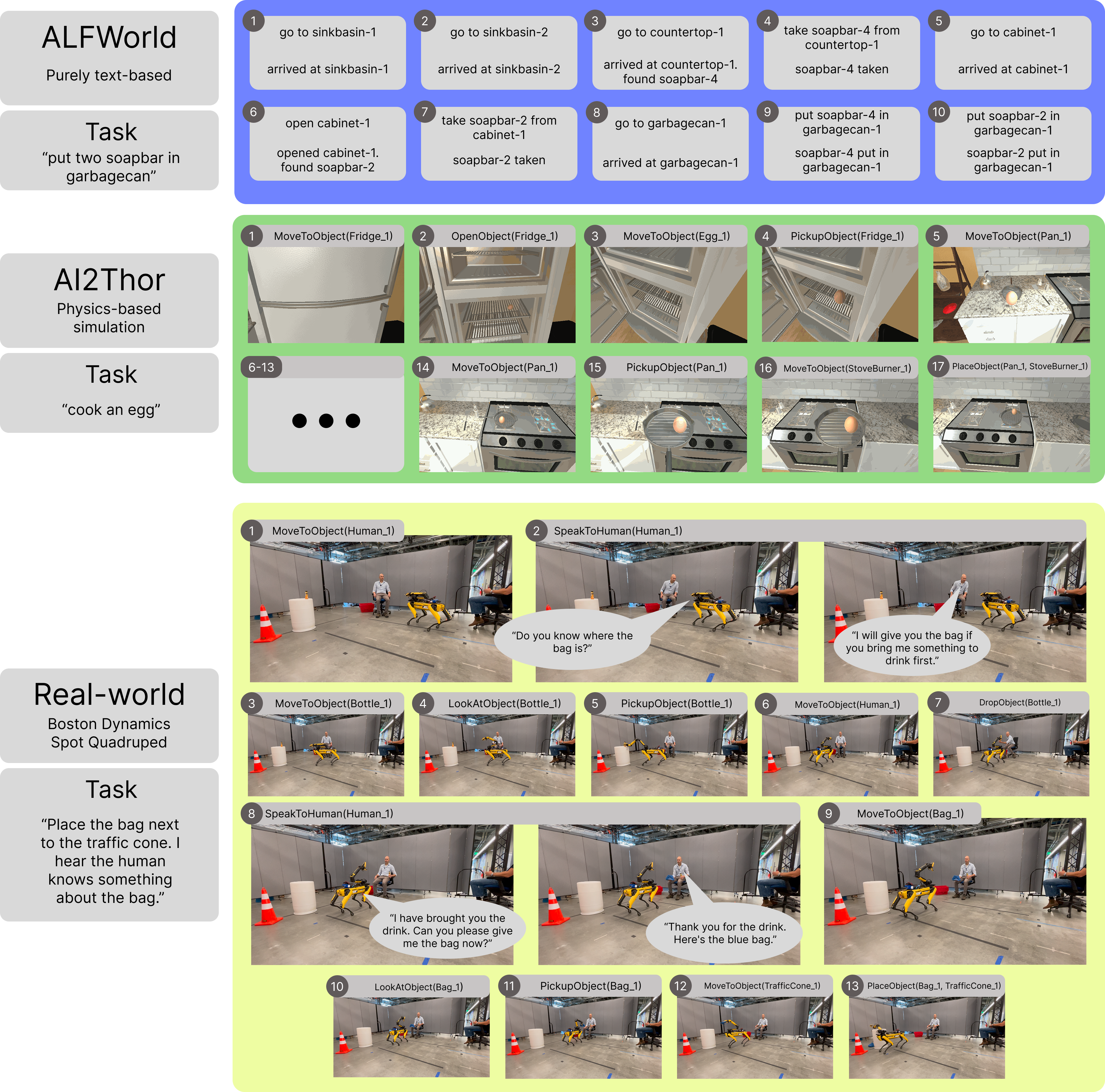
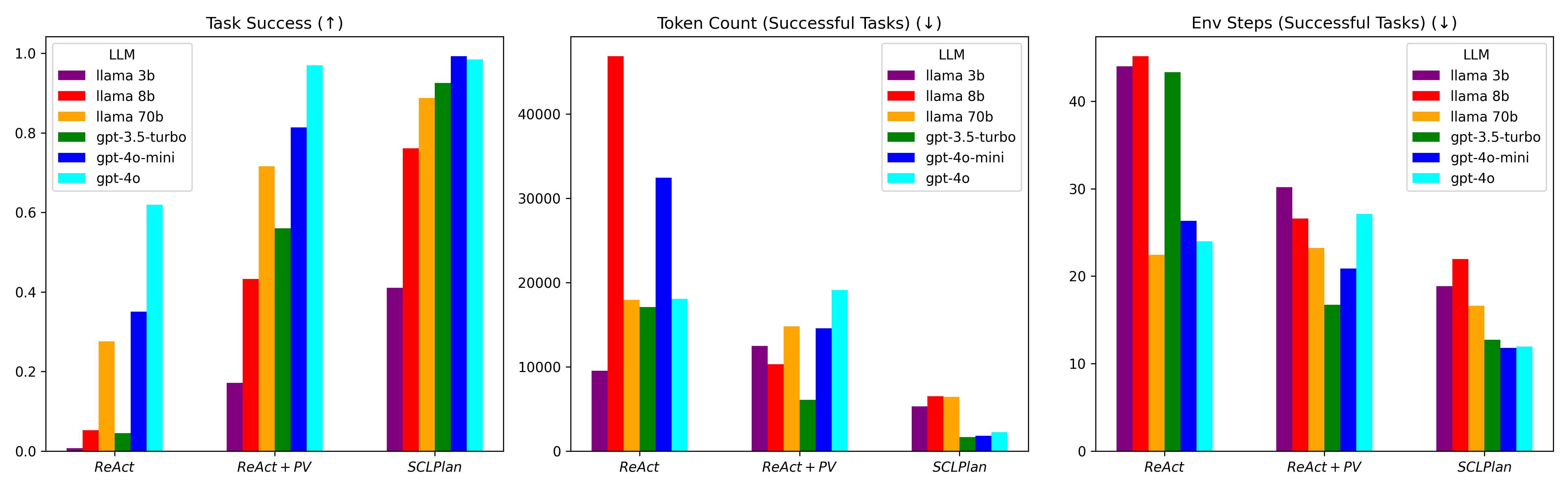
- 实验表明,该方法在ALFWorld上达到99%的成功率,在真实四足机器人抓取任务中达到100%的成功率,显著优于纯LLM和符号规划器。
📝 摘要(中文)
由于现实世界环境的非约束性,在具身任务执行中复制人类水平的智能仍然具有挑战性。利用大型语言模型(LLMs)进行任务规划旨在解决复杂规划任务中先前难以处理的状态/动作空间,但幻觉限制了它们的可靠性,因此限制了其在研究环境之外的可行性。此外,实现足够系统性能所需的提示工程缺乏透明度,因此缺乏可重复性。与LLM规划相比,符号规划方法提供强大的可靠性和可重复性保证,但难以扩展到现实世界任务的复杂性和模糊性。我们提出了一种新的机器人规划方法,该方法利用符号规划监督来增强LLM规划器,以提高可靠性和可重复性,并提供了一种透明的方法来定义硬约束,其清晰度远高于传统的提示工程。重要的是,这些增强保留了LLM的推理能力,并在开放世界环境中保持了令人印象深刻的泛化能力。我们在模拟和真实环境中演示了我们的方法。在ALFWorld规划基准测试中,我们的方法优于当前最先进的方法,实现了接近完美的99%的成功率。将我们的方法部署到真实的四足机器人上,在具身抓取和放置任务中,与纯LLM和符号规划器相比,我们的方法实现了100%的任务成功率,而纯LLM和符号规划器的成功率分别为50%和30%。我们的方法提出了一种有效的策略来增强基于LLM的机器人规划器的可靠性、可重复性和透明度,同时保留其关键优势:灵活性和对复杂现实世界环境的泛化能力。我们希望这项工作将有助于构建具有弹性的具身智能系统的广泛目标。
🔬 方法详解
问题定义:论文旨在解决在复杂、非结构化的现实世界环境中,如何提高基于LLM的机器人任务规划的可靠性、可重复性和透明度的问题。现有方法,特别是纯LLM规划,虽然具有强大的泛化能力,但容易产生幻觉,导致任务失败。同时,为了使LLM规划器工作,需要进行大量的提示工程,而这些提示工程往往缺乏透明度,难以复现。
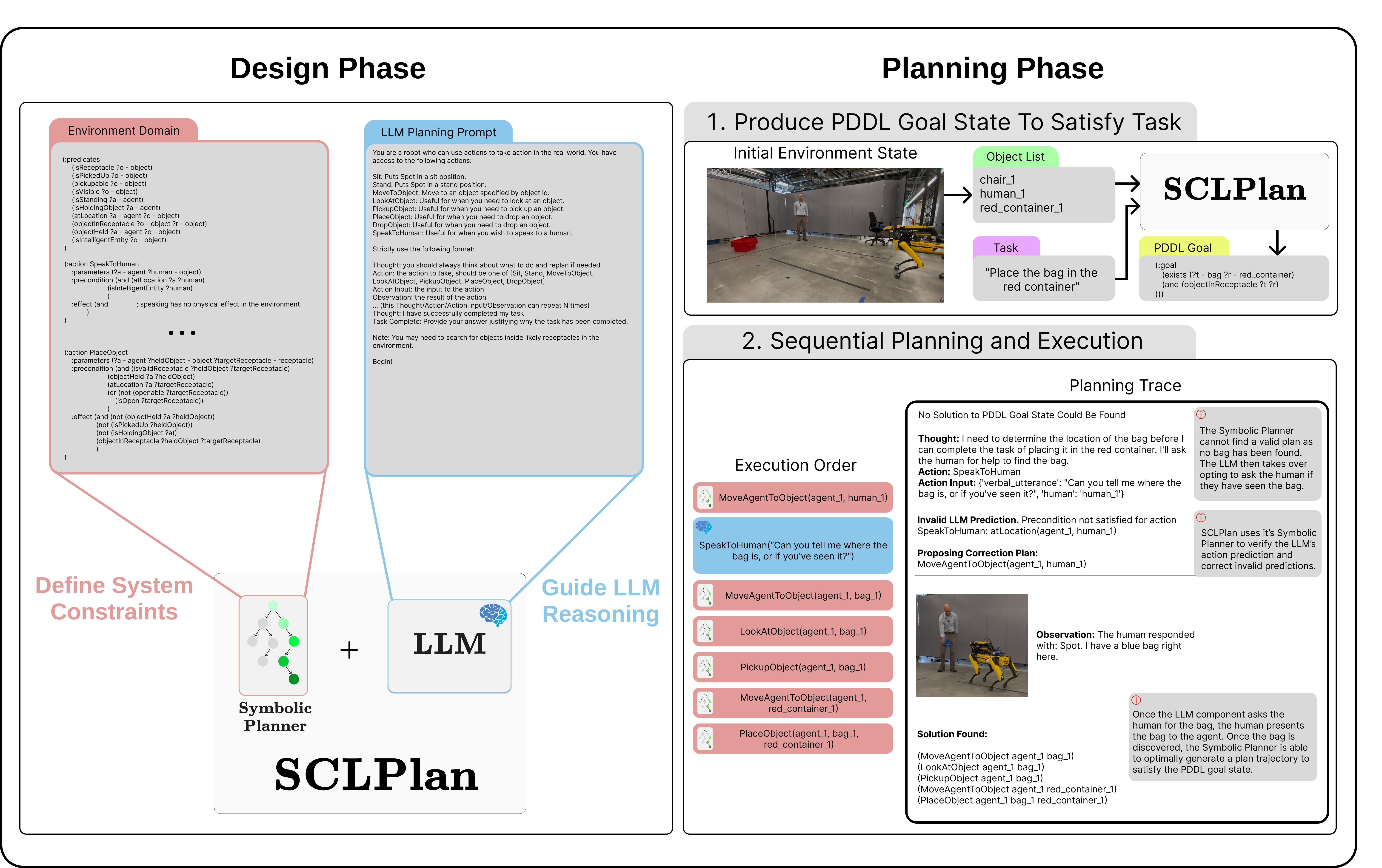
核心思路:论文的核心思路是将LLM规划与符号规划相结合。LLM负责生成高层次的任务规划,利用其强大的推理和泛化能力处理复杂环境。符号规划则负责对LLM生成的规划进行约束和验证,确保规划的可靠性和可执行性。通过这种混合方法,既保留了LLM的灵活性,又提高了规划的可靠性。
技术框架:该方法的技术框架主要包含以下几个模块:1) LLM规划器:负责生成初步的任务规划序列。2) 符号规划约束模块:定义任务的硬约束,例如物理约束、逻辑约束等。3) 规划验证模块:使用符号规划器验证LLM生成的规划是否满足定义的约束。如果违反约束,则反馈给LLM规划器进行修正。4) 任务执行模块:将验证后的规划转化为机器人可执行的动作序列,并控制机器人执行任务。
关键创新:该方法最重要的技术创新点在于将LLM规划与符号规划相结合,利用符号规划的约束能力来提高LLM规划的可靠性和可重复性。与传统的提示工程相比,该方法提供了一种更加透明和可控的方式来定义任务约束。此外,该方法还保留了LLM的推理和泛化能力,使其能够处理复杂和动态的现实世界环境。
关键设计:论文中关键的设计包括:1) 如何定义有效的符号约束,以确保规划的可靠性和可执行性。2) 如何将符号规划的验证结果反馈给LLM规划器,以实现规划的修正和优化。3) 如何平衡LLM的灵活性和符号规划的约束性,以实现最佳的任务规划性能。具体的参数设置、损失函数、网络结构等技术细节在论文中没有详细描述,属于未知信息。
🖼️ 关键图片
📊 实验亮点
该方法在ALFWorld规划基准测试中取得了99%的成功率,显著优于现有方法。在真实四足机器人抓取和放置任务中,该方法实现了100%的任务成功率,而纯LLM和符号规划器的成功率分别为50%和30%。这些实验结果表明,该方法能够有效提高机器人任务规划的可靠性和可重复性。
🎯 应用场景
该研究成果可应用于各种需要高可靠性和可重复性的机器人任务规划场景,例如:家庭服务机器人、工业自动化、医疗辅助机器人、搜索救援机器人等。通过提高机器人任务规划的可靠性,可以减少人为干预,提高工作效率,并降低潜在风险。未来,该方法有望扩展到更复杂的任务和环境,实现更智能、更可靠的机器人系统。
📄 摘要(原文)
Replicating human-level intelligence in the execution of embodied tasks remains challenging due to the unconstrained nature of real-world environments. Novel use of large language models (LLMs) for task planning seeks to address the previously intractable state/action space of complex planning tasks, but hallucinations limit their reliability, and thus, viability beyond a research context. Additionally, the prompt engineering required to achieve adequate system performance lacks transparency, and thus, repeatability. In contrast to LLM planning, symbolic planning methods offer strong reliability and repeatability guarantees, but struggle to scale to the complexity and ambiguity of real-world tasks. We introduce a new robotic planning method that augments LLM planners with symbolic planning oversight to improve reliability and repeatability, and provide a transparent approach to defining hard constraints with considerably stronger clarity than traditional prompt engineering. Importantly, these augmentations preserve the reasoning capabilities of LLMs and retain impressive generalization in open-world environments. We demonstrate our approach in simulated and real-world environments. On the ALFWorld planning benchmark, our approach outperforms current state-of-the-art methods, achieving a near-perfect 99% success rate. Deployment of our method to a real-world quadruped robot resulted in 100% task success compared to 50% and 30% for pure LLM and symbolic planners across embodied pick and place tasks. Our approach presents an effective strategy to enhance the reliability, repeatability and transparency of LLM-based robot planners while retaining their key strengths: flexibility and generalizability to complex real-world environments. We hope that this work will contribute to the broad goal of building resilient embodied intelligent systems.