The DISTANT Design for Remote Transmission and Steering Systems for Planetary Robotics
作者: Cristina Luna, Alba Guerra, Almudena Moreno, Manuel Esquer, Willy Roa, Mateusz Krawczak, Robert Popela, Piotr Osica, Davide Nicolis
分类: cs.RO
发布日期: 2025-10-07
备注: Paper for 18th Symposium on Advanced Space Technologies in Robotics and Automation (ASTRA), presented on October 7th at Leiden, Netherlands
💡 一句话要点
DISTANT:行星机器人远程传动与转向系统设计,提升极端环境适应性
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 行星机器人 远程传动 转向系统 极端环境 热管理 防尘设计 双叉臂悬架
📋 核心要点
- 行星探测任务对移动系统的鲁棒性提出了挑战,现有轮式执行器易受极端环境影响,导致性能下降。
- DISTANT设计将牵引和转向执行器移至漫游车内部的受保护区域,降低环境因素对关键部件的影响。
- 该系统采用双叉臂悬架和万向节,实现独立车轮控制,并集成了防尘和热管理机制,计划进行测试验证。
📝 摘要(中文)
本文提出了一种名为DISTANT(远程传动与转向系统)的新型设计,旨在将行星漫游车的牵引和转向执行器从轮式位置重新定位到漫游车主体内受热保护的暖箱中。该设计通过保护敏感组件免受热循环、灰尘污染和机械磨损的影响,从而应对长距离行驶任务中的关键挑战。经过全面的权衡分析,选择了带有万向节和绞盘驱动转向的双叉臂悬架配置作为最佳架构。该系统实现了独立的车轮牵引、转向控制和悬架管理,同时将所有电机装置都置于受保护的环境中。该设计满足了50公里的行驶要求,且性能没有下降,并集成了防尘保护机制和热管理解决方案。计划于2026年第一季度在1:3比例的面包板制造后进行测试和验证活动。
🔬 方法详解
问题定义:行星漫游车在极端环境下执行长距离任务时,轮式牵引和转向执行器面临严峻挑战,包括剧烈的温度变化、灰尘污染和机械磨损。这些因素会导致执行器性能下降、寿命缩短,甚至任务失败。现有方法通常将执行器直接安装在车轮附近,缺乏有效的保护措施。
核心思路:DISTANT设计的核心思路是将牵引和转向执行器从车轮附近转移到漫游车内部的受保护区域(暖箱)。通过远程传动和转向机构,实现对车轮的精确控制,同时避免执行器直接暴露于恶劣环境中。这种设计旨在提高系统的可靠性和耐久性,延长任务寿命。
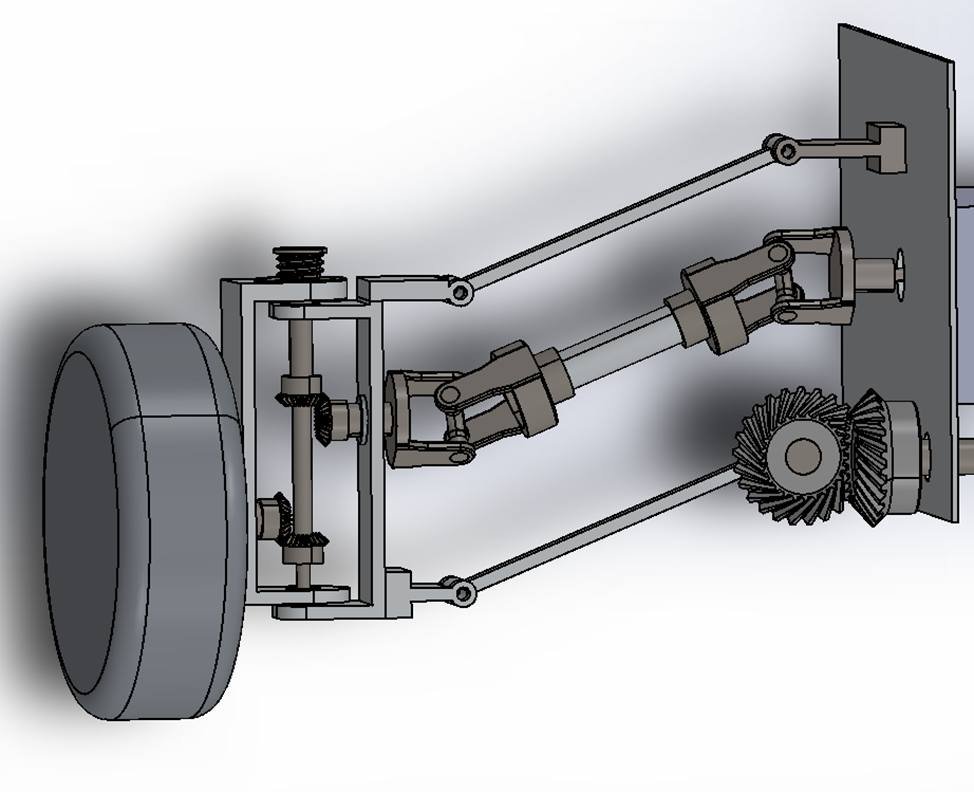
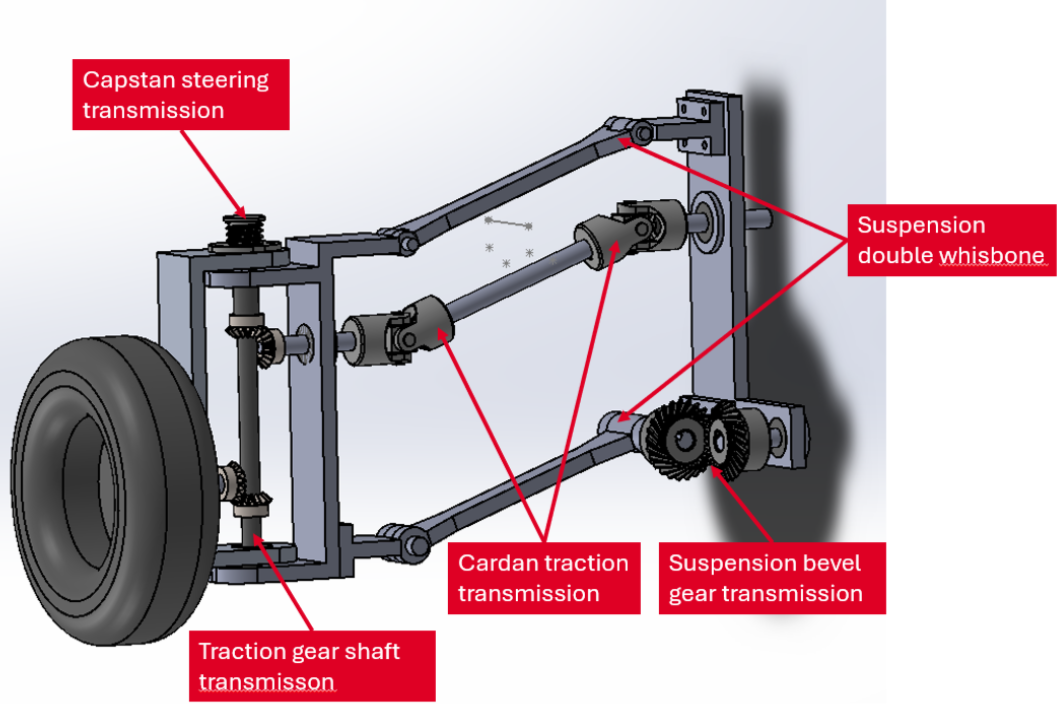
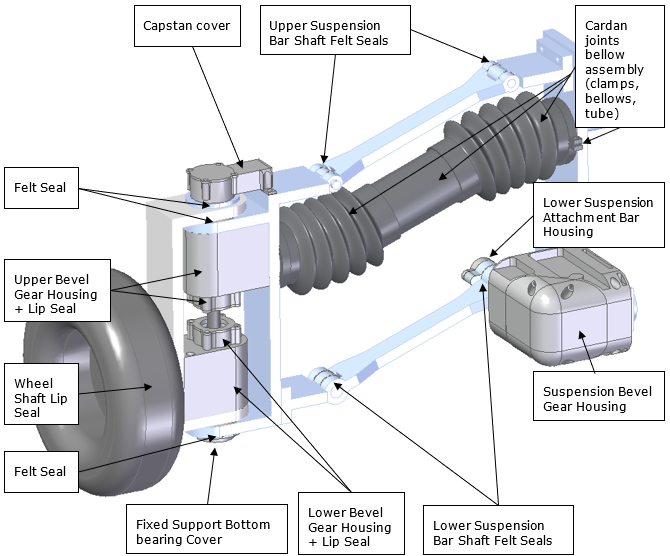
技术框架:DISTANT系统的整体架构包括以下几个主要模块:1) 双叉臂悬架系统:提供良好的悬挂性能和稳定性;2) 万向节:用于传递动力和转向角度,允许车轮在一定范围内自由运动;3) 绞盘驱动转向机构:实现精确的转向控制;4) 远程传动系统:将电机动力传递到车轮;5) 热保护暖箱:为电机和控制电子设备提供稳定的工作环境;6) 防尘保护机制:防止灰尘进入关键部件。
关键创新:DISTANT设计的关键创新在于其远程传动和转向的理念,以及将所有电机装置置于受保护环境中的实现方式。与传统的轮式执行器方案相比,DISTANT设计能够显著降低环境因素对执行器的影响,提高系统的可靠性和耐久性。此外,集成的防尘和热管理机制进一步增强了系统的适应性。
关键设计:在DISTANT设计中,双叉臂悬架的几何参数、万向节的尺寸和角度、绞盘驱动转向机构的传动比等都是关键的设计参数。这些参数需要根据漫游车的具体需求和任务环境进行优化。此外,暖箱的温度控制范围、防尘密封的性能、以及远程传动系统的效率也是重要的技术细节。
🖼️ 关键图片
📊 实验亮点
论文提出DISTANT设计,旨在解决行星漫游车在极端环境下执行长距离任务时,轮式执行器易受环境影响的问题。该设计通过将牵引和转向执行器移至漫游车内部的受保护区域,并采用双叉臂悬架、万向节和绞盘驱动转向机构,实现了独立的车轮控制和环境隔离。虽然目前尚未提供具体的实验数据,但该设计满足了50公里的行驶要求,且性能没有下降,并集成了防尘保护机制和热管理解决方案。计划于2026年第一季度进行测试和验证。
🎯 应用场景
DISTANT设计可应用于各种行星探测任务,尤其是在火星、月球等极端环境下执行长距离巡视任务的漫游车。该设计能够提高漫游车的可靠性和耐久性,延长任务寿命,从而获取更多有价值的科学数据。此外,该技术也可应用于其他需要在恶劣环境下工作的机器人系统,例如深海探测机器人、核电站检修机器人等。
📄 摘要(原文)
Planetary exploration missions require robust locomotion systems capable of operating in extreme environments over extended periods. This paper presents the DISTANT (Distant Transmission and Steering Systems) design, a novel approach for relocating rover traction and steering actuators from wheel-mounted positions to a thermally protected warm box within the rover body. The design addresses critical challenges in long-distance traversal missions by protecting sensitive components from thermal cycling, dust contamination, and mechanical wear. A double wishbone suspension configuration with cardan joints and capstan drive steering has been selected as the optimal architecture following comprehensive trade-off analysis. The system enables independent wheel traction, steering control, and suspension management whilst maintaining all motorisation within the protected environment. The design meets a 50 km traverse requirement without performance degradation, with integrated dust protection mechanisms and thermal management solutions. Testing and validation activities are planned for Q1 2026 following breadboard manufacturing at 1:3 scale.