A multi-modal tactile fingertip design for robotic hands to enhance dexterous manipulation
作者: Zhuowei Xu, Zilin Si, Kevin Zhang, Oliver Kroemer, Zeynep Temel
分类: cs.RO
发布日期: 2025-10-06
💡 一句话要点
提出一种低成本多模态触觉指尖设计,提升机器人灵巧操作能力
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 触觉感知 机器人灵巧操作 多模态融合 应变计 接触麦克风 机器人指尖 力觉传感 振动传感
📋 核心要点
- 机器人灵巧操作对触觉感知有很高需求,但现有触觉传感器成本高昂、集成困难。
- 论文提出一种低成本多模态触觉指尖,集成应变计和接触麦克风,感知静态力和高频振动。
- 实验表明,该指尖能有效提升机器人操作性能,例如在零视觉遮挡下精确计数纸杯。
📝 摘要(中文)
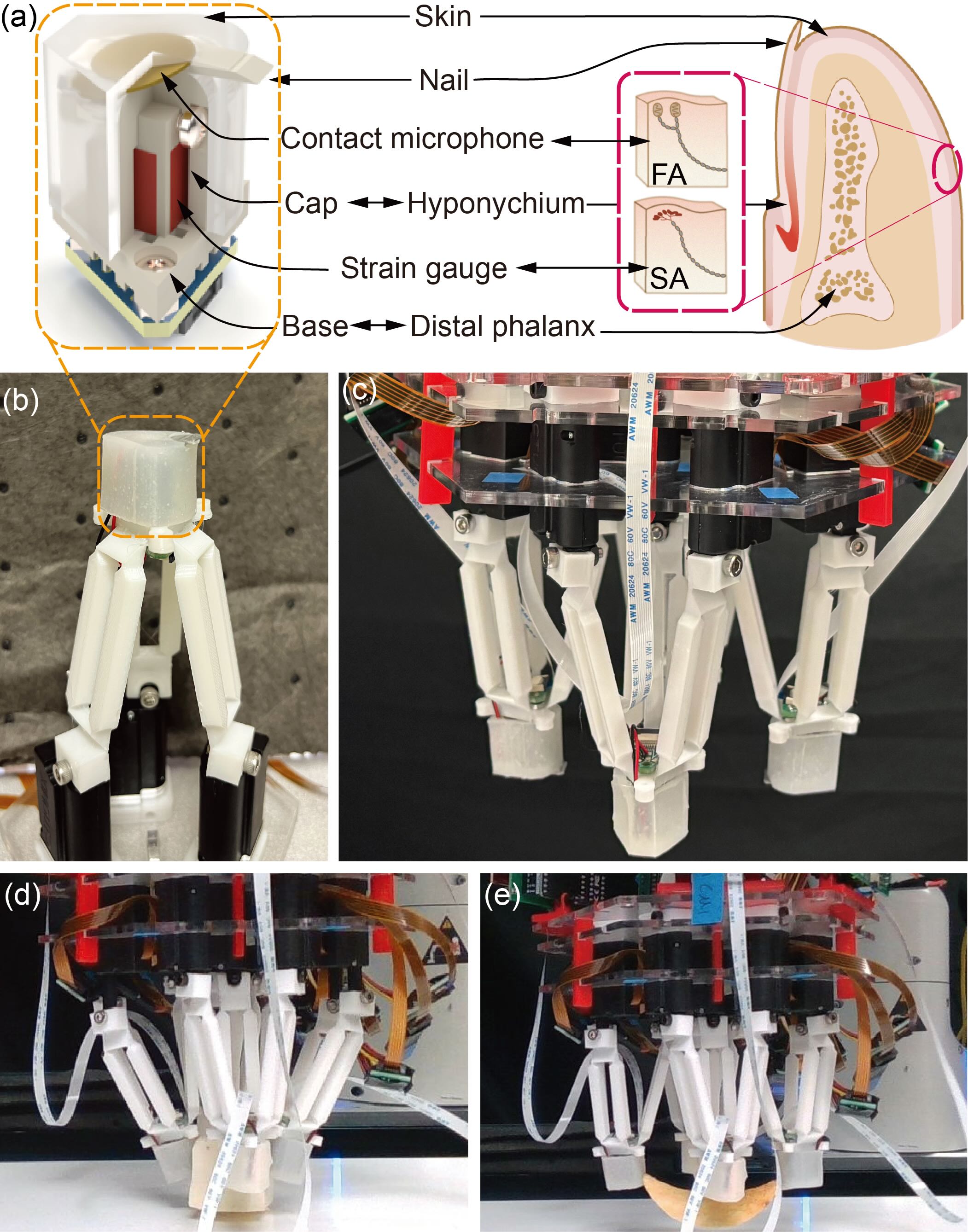
本文提出了一种低成本、易于制造、适应性强且紧凑的机器人手触觉指尖设计,集成了多模态触觉传感器。该设计使用应变计传感器捕获静态力,并使用接触麦克风传感器测量接触过程中的高频振动。这些触觉传感器集成在一个紧凑的设计中,传感器占用空间极小,并且所有传感器都位于指尖内部,因此不易受到交互造成的直接磨损。传感器特性分析表明,应变计传感器提供0-5N范围内可重复的二维平面力测量,接触麦克风传感器能够区分接触材料的属性。该设计应用于三个灵巧操作任务,涵盖从零视觉遮挡到完全视觉遮挡的情况。实验结果表明,不同的触觉感知模态可以灵活地应用于操作的不同阶段,单独使用或与视觉观察结合使用,以提高任务性能。例如,可以精确地从一叠纸杯中数出并取出所需数量的纸杯,成功率达到100%,这在仅使用视觉的情况下很难实现。
🔬 方法详解
问题定义:机器人灵巧操作需要精确的触觉反馈,但现有触觉传感器存在成本高、制造复杂、集成困难以及信号提取困难等问题,限制了其在机器人手中的应用。尤其是在复杂操作任务中,仅依赖视觉信息往往难以达到理想的精度和鲁棒性。
核心思路:论文的核心思路是设计一种低成本、易于制造和集成的多模态触觉指尖,通过融合静态力(应变计)和动态振动(接触麦克风)信息,提供更丰富、可靠的触觉感知。这种多模态融合能够克服单一传感器的局限性,提升机器人对环境和物体的理解能力。
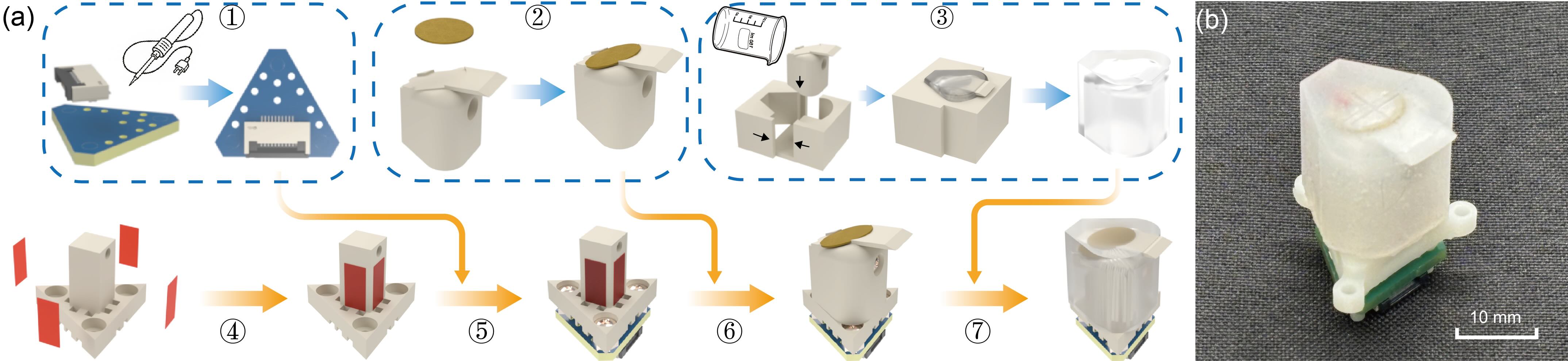
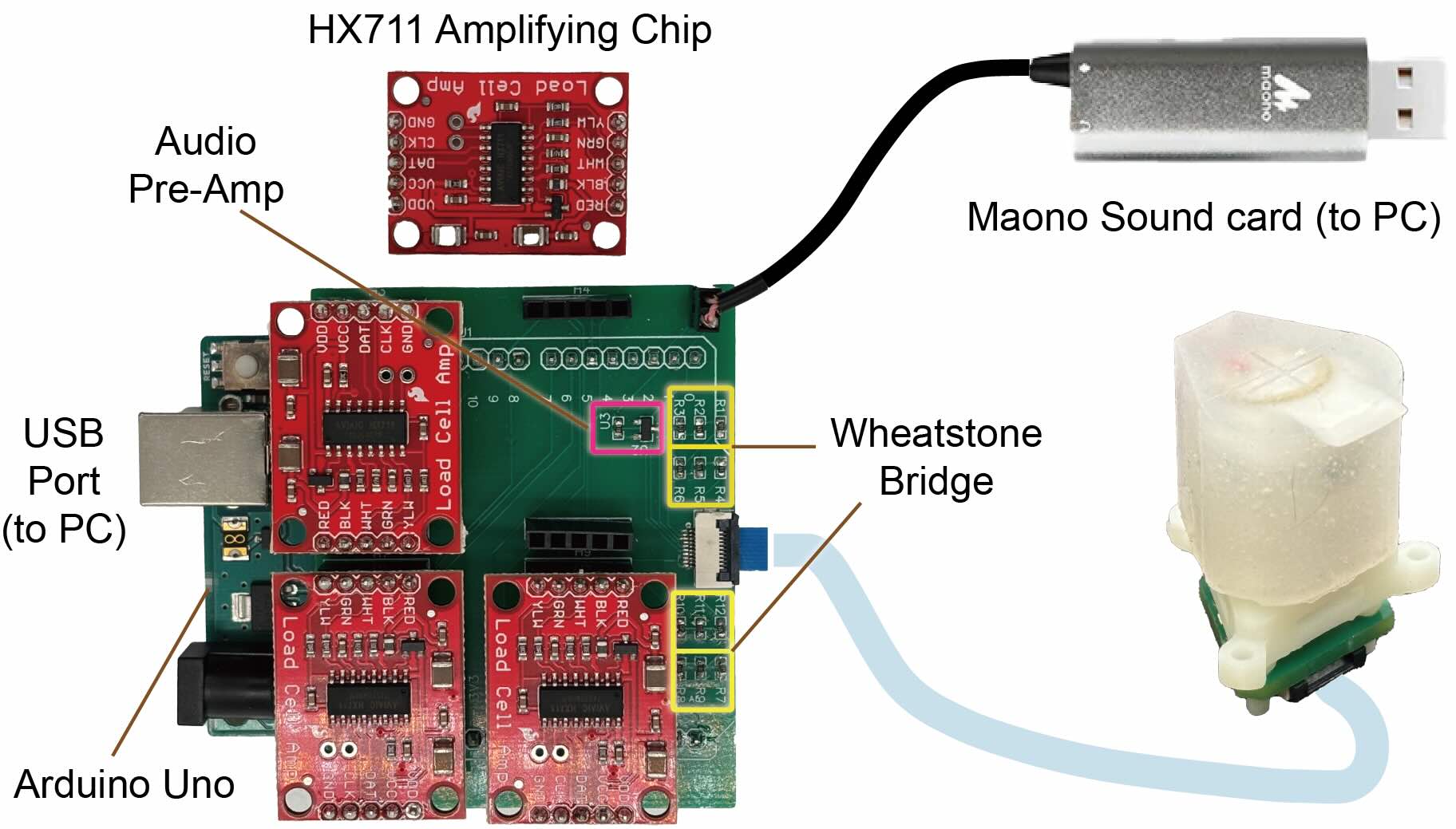
技术框架:该触觉指尖设计主要包含以下几个部分:1) 应变计传感器,用于测量静态力;2) 接触麦克风传感器,用于测量高频振动;3) 紧凑的指尖结构,用于集成传感器并保护其免受磨损;4) 数据采集和处理系统,用于读取和分析传感器数据。整体流程是从传感器采集数据,经过信号处理后,将触觉信息用于机器人控制和任务执行。
关键创新:该论文的关键创新在于将应变计和接触麦克风集成到紧凑的指尖设计中,实现了多模态触觉感知。这种设计不仅降低了成本,还提高了传感器的鲁棒性和易用性。此外,论文还展示了如何灵活地利用不同的触觉模态,结合视觉信息,来提升机器人操作的性能。
关键设计:应变计传感器用于测量0-5N范围内的二维平面力,接触麦克风传感器用于区分不同材料的属性。指尖的结构设计保证了传感器的紧凑性和内部保护。数据采集频率和信号处理方法(例如滤波、特征提取)需要根据具体的应用场景进行调整。论文中没有明确提及具体的损失函数或网络结构,但暗示了可以使用机器学习方法来处理和解释触觉数据。
🖼️ 关键图片
📊 实验亮点
实验结果表明,该触觉指尖设计能够有效提升机器人操作性能。例如,在纸杯计数任务中,仅使用视觉信息难以准确计数,而结合触觉信息后,机器人能够以100%的成功率从一叠纸杯中取出指定数量的纸杯。此外,接触麦克风传感器能够有效区分不同材料的属性,为机器人提供更丰富的环境感知信息。
🎯 应用场景
该研究成果可应用于各种需要灵巧操作的机器人应用场景,例如:工业自动化中的精密装配、医疗机器人中的微创手术、家庭服务机器人中的物品整理等。通过提供更丰富和可靠的触觉反馈,可以显著提升机器人的操作精度、鲁棒性和安全性,从而拓展机器人的应用范围和实际价值。
📄 摘要(原文)
Tactile sensing holds great promise for enhancing manipulation precision and versatility, but its adoption in robotic hands remains limited due to high sensor costs, manufacturing and integration challenges, and difficulties in extracting expressive and reliable information from signals. In this work, we present a low-cost, easy-to-make, adaptable, and compact fingertip design for robotic hands that integrates multi-modal tactile sensors. We use strain gauge sensors to capture static forces and a contact microphone sensor to measure high-frequency vibrations during contact. These tactile sensors are integrated into a compact design with a minimal sensor footprint, and all sensors are internal to the fingertip and therefore not susceptible to direct wear and tear from interactions. From sensor characterization, we show that strain gauge sensors provide repeatable 2D planar force measurements in the 0-5 N range and the contact microphone sensor has the capability to distinguish contact material properties. We apply our design to three dexterous manipulation tasks that range from zero to full visual occlusion. Given the expressiveness and reliability of tactile sensor readings, we show that different tactile sensing modalities can be used flexibly in different stages of manipulation, solely or together with visual observations to achieve improved task performance. For instance, we can precisely count and unstack a desired number of paper cups from a stack with 100\% success rate which is hard to achieve with vision only.