Walking, Rolling, and Beyond: First-Principles and RL Locomotion on a TARS-Inspired Robot
作者: Aditya Sripada, Abhishek Warrier
分类: cs.RO
发布日期: 2025-10-06
备注: 6 pages, 10 figures. Presented at IEEE-RAS International Conference on Humanoid Robots (Humanoids) 2025
💡 一句话要点
提出基于第一性原理和强化学习的TARS机器人新型运动控制方法
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 机器人运动控制 强化学习 多模态机器人 极限环 非仿人机器人
📋 核心要点
- 现有机器人运动研究多受生物启发,但许多人工环境中非仿人形态可能更优,需要探索新型机器人形态。
- 本研究基于电影中的TARS机器人,结合第一性原理建模和深度强化学习,探索其丰富的运动模式。
- 实验验证了基于模型的步态预测,并通过强化学习发现了新的运动行为,为多模态机器人提供了新思路。
📝 摘要(中文)
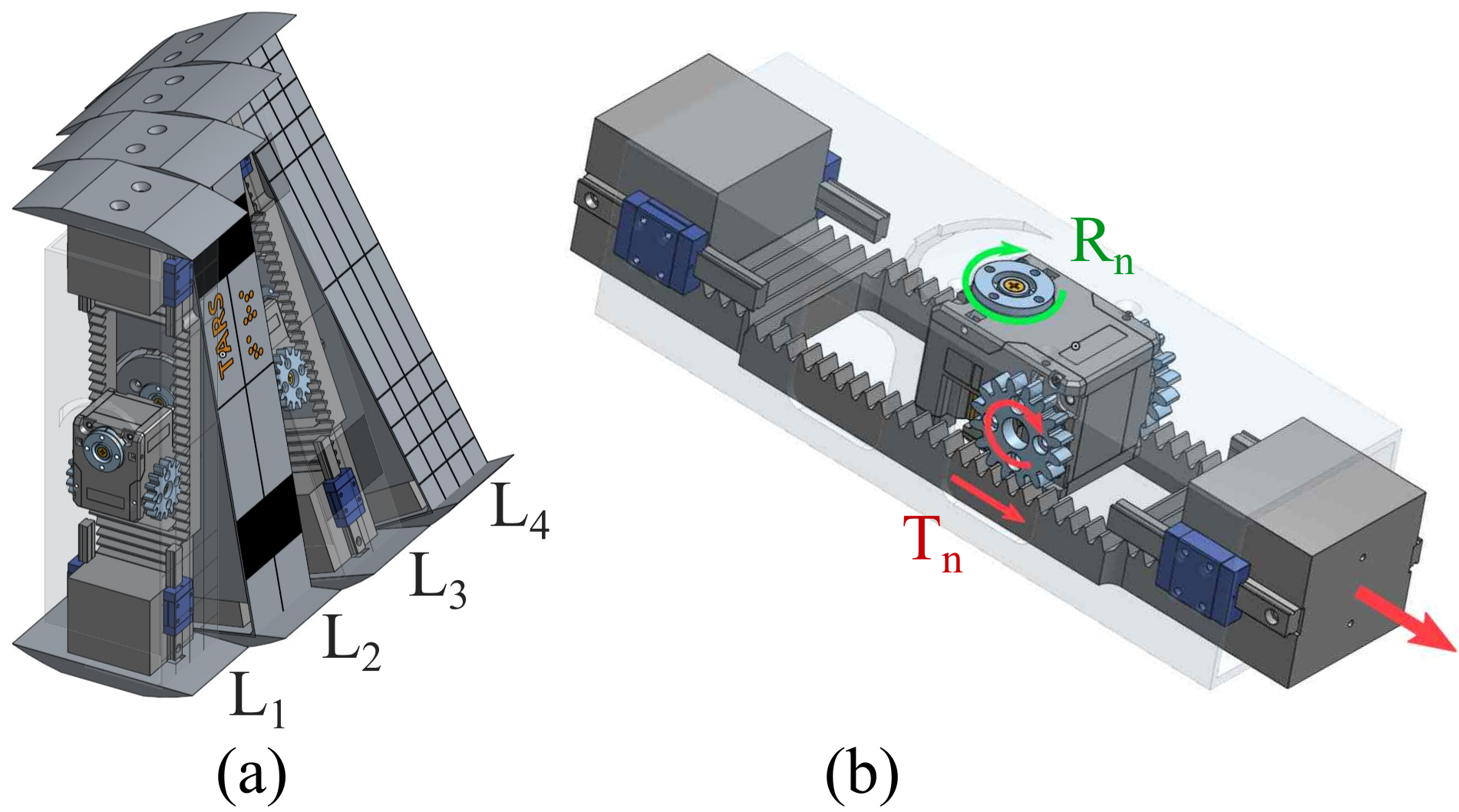
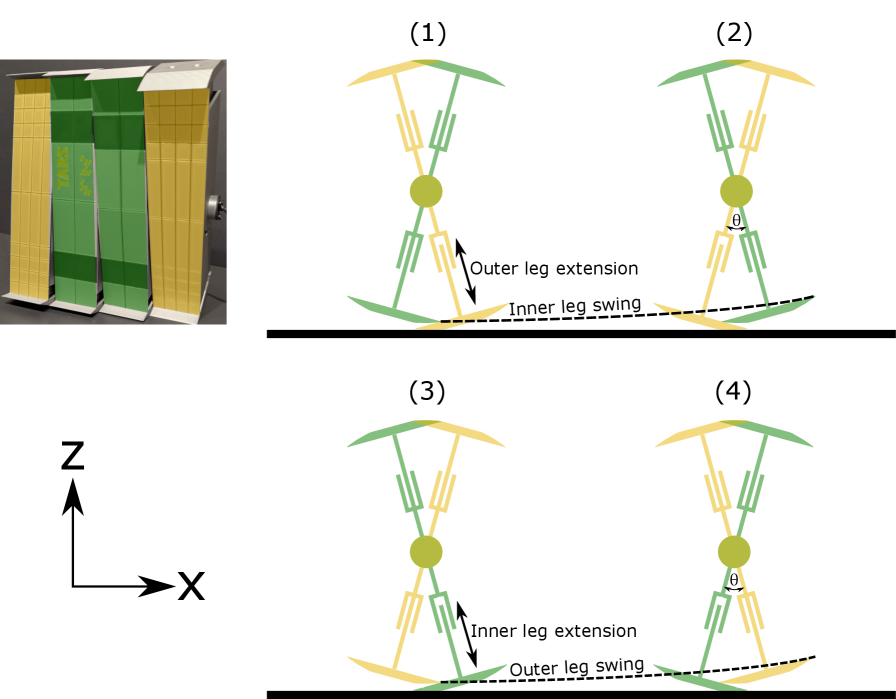
本研究将电影《星际穿越》中的块状机器人“TARS”转化为一个0.25米、0.99公斤的七自由度研究平台TARS3D。论文针对TARS3D,构建了两种主要步态的降阶模型:类双足行走和高速滚动模式,推导了闭式极限环条件,并在硬件上验证了预测结果。实验证实,机器人满足其+/-150度髋关节限制,左右交替接触且无干涉,并在滚动模式下保持八步混合极限环。由于每个伸缩腿提供四个接触角,滚动步态被建模为八辐双轮辋轮。伸缩腿的冗余性意味着比分析处理的两个极限环更丰富的步态。因此,在仿真中使用深度强化学习(DRL)来搜索未探索的空间。观察到,学习到的策略可以在正确的先验下恢复解析步态,并发现新的行为。研究结果表明,TARS3D的灵感来自科幻小说的超越生物形态,可以实现多种以前未探索的运动模式,并且进一步的学习驱动搜索可能会揭示更多。分析综合和强化学习的结合为多模态机器人技术开辟了一条有希望的途径。
🔬 方法详解
问题定义:现有机器人运动控制方法主要集中在仿生设计上,忽略了非仿人形态机器人在特定环境下的潜力。TARS3D机器人具有独特的块状形态和伸缩腿结构,其运动控制策略尚待探索。现有方法难以充分利用其形态优势,实现多样化的运动模式。
核心思路:本研究结合解析建模和强化学习,充分挖掘TARS3D机器人的运动潜力。首先,利用第一性原理建立简化模型,分析其基本运动模式的极限环条件。然后,利用深度强化学习探索更复杂的运动策略,弥补解析建模的局限性。
技术框架:整体框架包含两个主要部分:解析建模和强化学习。解析建模部分,针对类双足行走和高速滚动两种步态,建立降阶模型,推导闭式极限环条件,并在硬件上进行验证。强化学习部分,在仿真环境中训练深度神经网络,学习控制TARS3D机器人的运动策略。通过奖励函数引导机器人学习期望的运动行为。
关键创新:本研究的关键创新在于将解析建模和强化学习相结合,用于探索新型机器人形态的运动控制。解析建模提供了对机器人基本运动模式的理解,为强化学习提供了良好的先验知识。强化学习则能够探索更复杂的运动策略,弥补解析建模的局限性。
关键设计:在解析建模中,将滚动步态建模为八辐双轮辋轮,简化了运动学分析。在强化学习中,使用深度神经网络作为策略网络,通过调整奖励函数来引导机器人学习不同的运动行为。具体的网络结构和超参数设置在论文中未详细说明(未知)。
🖼️ 关键图片
📊 实验亮点
实验结果表明,TARS3D机器人能够实现类双足行走和高速滚动两种基本步态,并满足髋关节角度限制。通过强化学习,机器人能够学习到新的运动行为,证明了其形态的运动潜力。论文验证了基于模型的步态预测,并展示了强化学习在探索新型机器人运动控制方面的有效性。
🎯 应用场景
该研究成果可应用于复杂地形下的机器人运动、物流运输、搜救等领域。TARS3D的独特形态使其在狭窄空间或障碍物较多的环境中具有优势。通过进一步优化控制策略,有望实现更高效、更稳定的运动性能,提升机器人在实际应用中的适应性和可靠性。
📄 摘要(原文)
Robotic locomotion research typically draws from biologically inspired leg designs, yet many human-engineered settings can benefit from non-anthropomorphic forms. TARS3D translates the block-shaped 'TARS' robot from Interstellar into a 0.25 m, 0.99 kg research platform with seven actuated degrees of freedom. The film shows two primary gaits: a bipedal-like walk and a high-speed rolling mode. For TARS3D, we build reduced-order models for each, derive closed-form limit-cycle conditions, and validate the predictions on hardware. Experiments confirm that the robot respects its +/-150 degree hip limits, alternates left-right contacts without interference, and maintains an eight-step hybrid limit cycle in rolling mode. Because each telescopic leg provides four contact corners, the rolling gait is modeled as an eight-spoke double rimless wheel. The robot's telescopic leg redundancy implies a far richer gait repertoire than the two limit cycles treated analytically. So, we used deep reinforcement learning (DRL) in simulation to search the unexplored space. We observed that the learned policy can recover the analytic gaits under the right priors and discover novel behaviors as well. Our findings show that TARS3D's fiction-inspired bio-transcending morphology can realize multiple previously unexplored locomotion modes and that further learning-driven search is likely to reveal more. This combination of analytic synthesis and reinforcement learning opens a promising pathway for multimodal robotics.