Building Gradient by Gradient: Decentralised Energy Functions for Bimanual Robot Assembly
作者: Alexander L. Mitchell, Joe Watson, Ingmar Posner
分类: cs.RO
发布日期: 2025-10-06 (更新: 2025-12-08)
备注: 8 pages, 7 figures, 1 table
💡 一句话要点
提出基于分散能量函数的梯度构建方法,用于双臂机器人装配
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱九:具身大模型 (Embodied Foundation Models)
关键词: 双臂机器人 机器人装配 能量函数 梯度下降 任务规划 运动规划 分散控制
📋 核心要点
- 双臂装配中,现有任务和运动规划方法在面对扰动时,收敛速度慢,且显式任务序列定义繁琐,限制了灵活性。
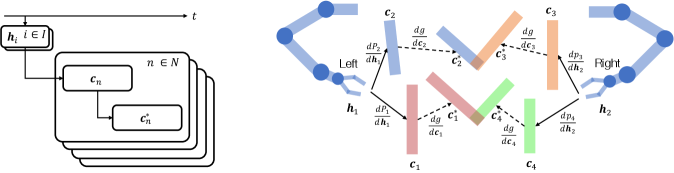
- 论文提出一种基于分散梯度的框架,通过自适应势函数的组合,利用分段连续能量函数进行近视优化,生成子目标。
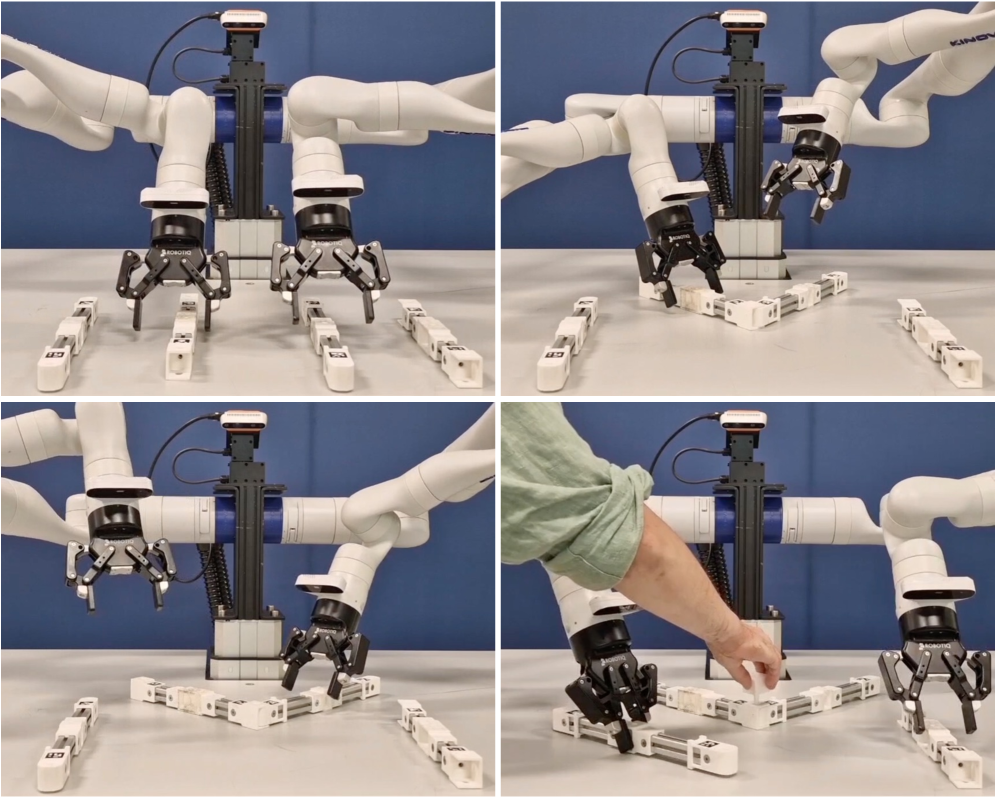
- 实验表明,该方法能够扩展到物理双臂装配任务,并能涌现出自动重试、协调运动和自主移交等行为。
📝 摘要(中文)
双臂装配面临诸多挑战,包括高层序列规划、多机器人协调以及低层接触操作,如零件配合。任务和运动规划(TAMP)方法虽然有效,但在适应需要新的任务序列和优化的扰动时,收敛速度可能过慢。在公差配合装配中,由于摩擦或形变等难以建模的动力学特性,需要快速重规划和重试,这种情况很常见。此外,为装配定义显式任务序列可能很繁琐,限制了任务重规划的灵活性。为了简化规划,我们引入了一种基于分散梯度的框架,该框架通过自适应势函数的自动组合使用分段连续能量函数。这种方法仅使用近视优化生成子目标,而不是长程规划。由于能量函数的结构和适应性,它在解决长程任务方面表现出有效性。我们证明了我们的方法可以扩展到物理双臂装配任务,用于构建公差配合组件。在这些实验中,我们发现我们的基于梯度的快速重规划框架以涌现的方式生成自动重试、协调运动和自主移交。
🔬 方法详解
问题定义:论文旨在解决双臂机器人装配中,传统任务和运动规划方法在面对扰动时重规划速度慢,以及显式任务序列定义繁琐的问题。现有方法难以快速适应摩擦、形变等复杂动力学,且缺乏灵活性,限制了其在公差配合装配等场景的应用。
核心思路:论文的核心思路是利用分散的能量函数,通过梯度下降的方式引导机器人的运动。每个机器人臂都根据自身的能量函数进行优化,从而实现分散式的控制。通过自适应势函数的组合,构建一个分段连续的能量函数,使得机器人能够逐步接近目标状态。这种方法避免了长程规划,而是采用近视优化,从而提高了重规划的速度。
技术框架:整体框架包含以下几个主要模块:1) 自适应势函数生成模块:根据当前状态和目标状态,生成相应的势函数。2) 能量函数组合模块:将各个势函数组合成一个全局的能量函数。3) 梯度计算模块:计算能量函数的梯度,得到机器人的运动方向。4) 运动控制模块:根据梯度信息,控制机器人的运动。整个流程是一个迭代的过程,机器人不断地根据当前状态调整势函数,并沿着梯度方向运动,直到达到目标状态。
关键创新:最重要的技术创新点在于分散式的能量函数设计和自适应势函数的组合。与传统的集中式规划方法不同,该方法将规划任务分解为多个子任务,每个机器人臂独立进行优化,从而提高了规划的效率和鲁棒性。自适应势函数能够根据环境的变化动态调整,使得机器人能够更好地适应复杂的动力学环境。
关键设计:论文中,势函数的设计是关键。势函数需要能够反映机器人与目标状态之间的距离,并且能够引导机器人朝着目标状态运动。论文中使用了多种势函数,例如吸引势、排斥势等,并根据不同的任务需求进行组合。此外,梯度下降的步长也是一个重要的参数,需要根据具体的任务进行调整,以保证机器人的运动稳定性和收敛速度。
🖼️ 关键图片
📊 实验亮点
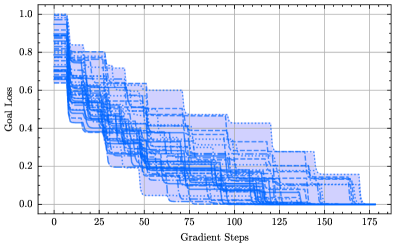
实验结果表明,该方法能够成功地完成公差配合装配任务,并且能够涌现出自动重试、协调运动和自主移交等行为。与传统的任务和运动规划方法相比,该方法在重规划速度方面有显著提升,能够更好地适应复杂的动力学环境。具体的性能数据和对比基线在论文中进行了详细的展示。
🎯 应用场景
该研究成果可应用于各种需要双臂机器人协同操作的场景,例如精密仪器装配、医疗手术辅助、以及自动化生产线等。通过快速重规划和自适应调整,机器人能够更好地适应复杂的工作环境,提高生产效率和产品质量。未来,该方法有望扩展到更多机器人协同任务,例如多机器人协作搬运、复杂环境下的机器人导航等。
📄 摘要(原文)
There are many challenges in bimanual assembly, including high-level sequencing, multi-robot coordination, and low-level, contact-rich operations such as component mating. Task and motion planning (TAMP) methods, while effective in this domain, may be prohibitively slow to converge when adapting to disturbances that require new task sequencing and optimisation. These events are common during tight-tolerance assembly, where difficult-to-model dynamics such as friction or deformation require rapid replanning and reattempts. Moreover, defining explicit task sequences for assembly can be cumbersome, limiting flexibility when task replanning is required. To simplify this planning, we introduce a decentralised gradient-based framework that uses a piecewise continuous energy function through the automatic composition of adaptive potential functions. This approach generates sub-goals using only myopic optimisation, rather than long-horizon planning. It demonstrates effectiveness at solving long-horizon tasks due to the structure and adaptivity of the energy function. We show that our approach scales to physical bimanual assembly tasks for constructing tight-tolerance assemblies. In these experiments, we discover that our gradient-based rapid replanning framework generates automatic retries, coordinated motions and autonomous handovers in an emergent fashion.