Everything-Grasping (EG) Gripper: A Universal Gripper with Synergistic Suction-Grasping Capabilities for Cross-Scale and Cross-State Manipulation
作者: Jianshu Zhou, Jing Shu, Tianle Pan, Puchen Zhu, Jiajun An, Huayu Zhang, Junda Huang, Upinder Kaur, Xin Ma, Masayoshi Tomizuka
分类: cs.RO
发布日期: 2025-10-06
备注: 19 pages, 10 figures, journal
💡 一句话要点
EG Gripper:一种用于跨尺度和跨状态操作的协同吸取抓取通用夹爪
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 软体机器人 通用夹爪 吸取抓取 颗粒阻塞 触觉传感
📋 核心要点
- 现有软体夹爪难以同时处理不同尺寸和状态(固体、液体)的物体,尤其是在没有气密密封的情况下。
- EG Gripper通过协同结合分布式表面吸取和内部颗粒阻塞,实现了对不同尺度和状态物体的抓取。
- 实验表明,EG Gripper能够可靠地抓取从亚毫米级到大型物体,并在水下、易碎物体和液体抓取等任务中表现出色。
📝 摘要(中文)
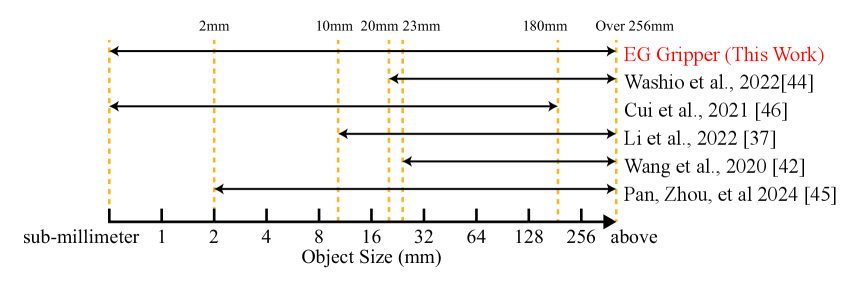
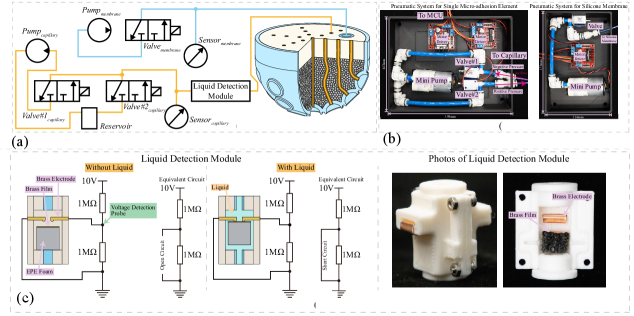
本文提出了一种名为Everything-Grasping (EG) Gripper的软体末端执行器,它协同集成了分布式表面吸取和内部颗粒阻塞,实现了跨尺度和跨状态的操作,而无需在与目标物体的接触界面上进行气密密封。EG Gripper可以处理表面积范围从亚毫米级0.2 mm²(玻璃珠)到超过62,000 mm²(A4纸和编织袋)的物体,使其能够操作比自身接触面积(直径30毫米的底座,约为707 mm²)小近3,500倍和大88倍的物体。此外,本文还引入了一种触觉传感框架,该框架结合了液体检测和基于压力的吸取反馈,从而能够实时区分固体和液体目标。在触觉推断抓取模式选择(TIGMS)算法的指导下,夹爪可以根据分布式压力和电压信号自主选择抓取模式。在各种任务(包括水下抓取、易碎物体处理和液体捕获)中的实验证明了其稳健性和可重复性。据我们所知,这是第一个使用统一的柔顺架构可靠地抓取跨尺度的固体和液体物体的软体夹爪。
🔬 方法详解
问题定义:现有软体夹爪在处理不同尺寸和物理状态(固体和液体)的物体时面临挑战,尤其是在没有气密密封的情况下。这限制了其在复杂环境和多样化任务中的应用。现有方法通常需要针对特定物体或状态进行定制设计,缺乏通用性和适应性。
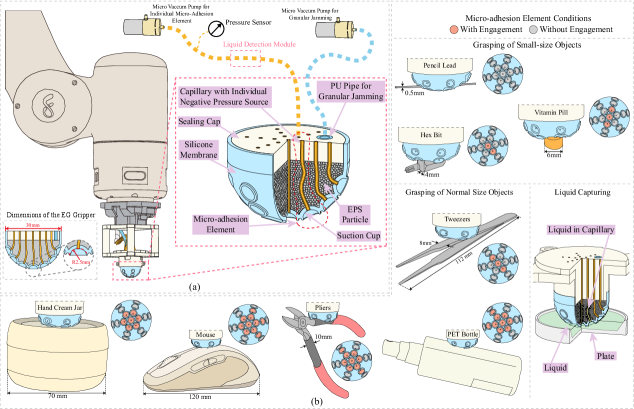
核心思路:EG Gripper的核心思路是协同结合分布式表面吸取和内部颗粒阻塞。分布式表面吸取提供初始的抓取力,适用于各种形状和材料的物体。内部颗粒阻塞则通过增加夹爪的刚度,增强抓取的稳定性,尤其是在处理液体或不规则形状的物体时。这种协同作用使得夹爪能够在没有气密密封的情况下,可靠地抓取不同尺度和状态的物体。
技术框架:EG Gripper的整体架构包括:1)柔性夹爪本体,包含多个吸盘和内部颗粒填充;2)真空泵,用于提供吸取力;3)触觉传感器,用于检测物体状态(固体或液体)和吸取压力;4)控制系统,根据触觉传感器的反馈,自主选择抓取模式。TIGMS算法是控制系统的核心,它根据分布式压力和电压信号,实时判断物体状态并选择合适的抓取模式。
关键创新:EG Gripper最重要的技术创新点在于其协同吸取抓取机制,以及基于触觉反馈的自主抓取模式选择。与传统的软体夹爪相比,EG Gripper不需要气密密封,能够处理更广泛的物体类型和状态。TIGMS算法使得夹爪能够根据物体状态自主调整抓取策略,提高了抓取的鲁棒性和适应性。
关键设计:EG Gripper的关键设计包括:1)吸盘的分布和尺寸,需要根据目标物体的尺寸和形状进行优化;2)内部颗粒的材料和填充密度,影响夹爪的刚度和抓取力;3)触觉传感器的类型和位置,决定了物体状态检测的准确性和灵敏度;4)TIGMS算法的参数设置,需要根据实验数据进行调整,以实现最佳的抓取性能。
🖼️ 关键图片
📊 实验亮点
实验结果表明,EG Gripper能够抓取表面积范围从0.2 mm²到62,000 mm²的物体,实现了跨尺度的操作。在水下抓取、易碎物体处理和液体捕获等任务中,EG Gripper表现出良好的稳健性和可重复性。TIGMS算法能够根据物体状态自主选择抓取模式,提高了抓取的成功率。
🎯 应用场景
EG Gripper在多个领域具有广泛的应用前景,包括:1)自动化装配,能够处理不同尺寸和形状的零件;2)医疗机器人,可以安全地抓取和操作生物组织和液体;3)食品加工,能够处理各种形状和状态的食品;4)水下机器人,可以抓取水生生物和水下物体。其通用性和适应性使其成为未来机器人操作的重要工具。
📄 摘要(原文)
Grasping objects across vastly different sizes and physical states-including both solids and liquids-with a single robotic gripper remains a fundamental challenge in soft robotics. We present the Everything-Grasping (EG) Gripper, a soft end-effector that synergistically integrates distributed surface suction with internal granular jamming, enabling cross-scale and cross-state manipulation without requiring airtight sealing at the contact interface with target objects. The EG Gripper can handle objects with surface areas ranging from sub-millimeter scale 0.2 mm2 (glass bead) to over 62,000 mm2 (A4 sized paper and woven bag), enabling manipulation of objects nearly 3,500X smaller and 88X larger than its own contact area (approximated at 707 mm2 for a 30 mm-diameter base). We further introduce a tactile sensing framework that combines liquid detection and pressure-based suction feedback, enabling real-time differentiation between solid and liquid targets. Guided by the actile-Inferred Grasping Mode Selection (TIGMS) algorithm, the gripper autonomously selects grasping modes based on distributed pressure and voltage signals. Experiments across diverse tasks-including underwater grasping, fragile object handling, and liquid capture-demonstrate robust and repeatable performance. To our knowledge, this is the first soft gripper to reliably grasp both solid and liquid objects across scales using a unified compliant architecture.