PAD-TRO: Projection-Augmented Diffusion for Direct Trajectory Optimization
作者: Jushan Chen, Santiago Paternain
分类: cs.RO, eess.SY
发布日期: 2025-10-06 (更新: 2026-01-21)
备注: Accepted for publication at the 2026 American Control Conference
💡 一句话要点
提出PAD-TRO:一种基于投影增强扩散的直接轨迹优化方法,解决动态可行性约束问题。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 轨迹优化 扩散模型 动态可行性 无梯度优化 机器人 运动规划 四旋翼飞行器
📋 核心要点
- 现有基于扩散的轨迹优化方法难以显式强制状态约束,导致次优解和动态可行性问题。
- 提出一种基于模型扩散的直接轨迹优化方法,通过无梯度投影机制确保动态可行性。
- 实验表明,该方法在四旋翼导航场景中显著提高了成功率,并实现了零动态可行性误差。
📝 摘要(中文)
扩散模型因其建模多模态概率分布的能力,在轨迹优化中日益受到关注。然而,解决非线性等式约束,即动态可行性,仍然是基于扩散的轨迹优化中的一个巨大挑战。现有的基于扩散的轨迹优化框架依赖于单次射击方法,其中去噪后的控制序列被应用于前向传播动力学系统,这无法显式地强制状态约束,并且经常导致次优解。本文提出了一种新颖的基于模型扩散的直接轨迹优化方法,该方法直接生成状态序列。为了确保动态可行性,我们提出了一种无梯度投影机制,该机制被整合到反向扩散过程中。结果表明,与最新的基线方法相比,我们的方法在涉及密集静态障碍物的四旋翼飞行器航点导航场景中,实现了零动态可行性误差和大约4倍的成功率。
🔬 方法详解
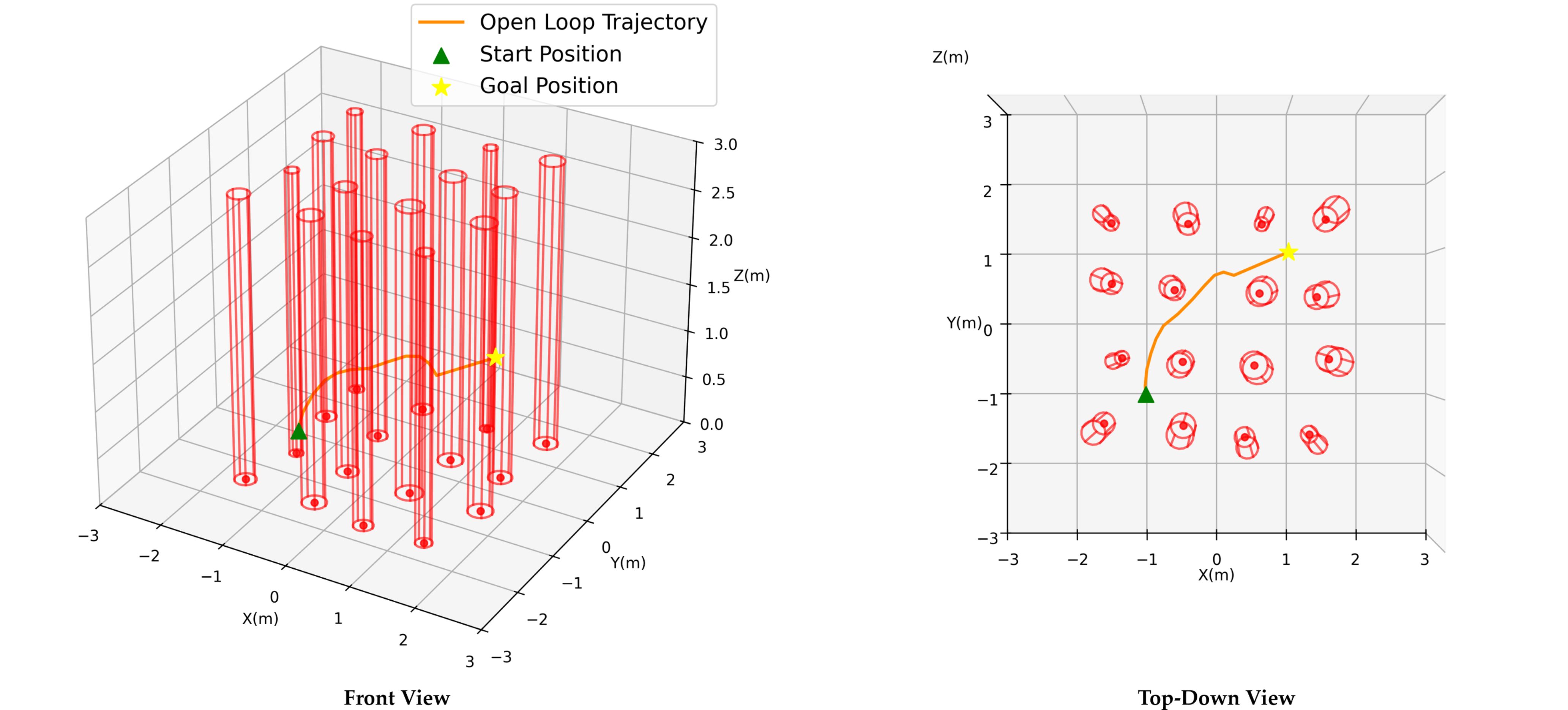
问题定义:论文旨在解决基于扩散模型的轨迹优化中,难以满足动态可行性约束的问题。现有方法通常采用单次射击方式,即通过控制序列前向积分得到轨迹,难以直接约束状态,导致轨迹不满足动力学方程,从而影响优化效果。
核心思路:论文的核心思路是直接生成状态序列,而不是控制序列,并在反向扩散过程中引入一个无梯度投影机制,将生成的状态投影到满足动力学约束的流形上。这样可以显式地保证轨迹的动态可行性,避免了传统方法中因控制序列积分带来的误差累积。
技术框架:PAD-TRO的整体框架包括一个扩散模型和一个投影模块。扩散模型负责生成状态序列的初始噪声,然后通过反向扩散过程逐步去噪,生成最终的轨迹。在反向扩散的每一步,投影模块将当前状态投影到满足动力学约束的流形上,确保轨迹的动态可行性。整个过程无需梯度信息,适用于复杂的非线性动力学系统。
关键创新:该方法最重要的创新点在于将无梯度投影机制融入到扩散模型的反向过程中,实现了动态可行性约束的显式强制。与传统的单次射击方法相比,该方法避免了因控制序列积分带来的误差累积,提高了轨迹的优化效果和动态可行性。
关键设计:论文采用了一种基于高斯过程的无梯度投影方法。具体来说,对于每个状态,首先在其邻域内采样多个状态,然后利用高斯过程拟合这些状态的动力学误差,最后通过优化高斯过程的参数,找到一个使得动力学误差最小的状态,作为投影后的状态。此外,论文还设计了一个特殊的损失函数,用于训练扩散模型,使得生成的轨迹更加平滑和接近最优解。
🖼️ 关键图片
📊 实验亮点
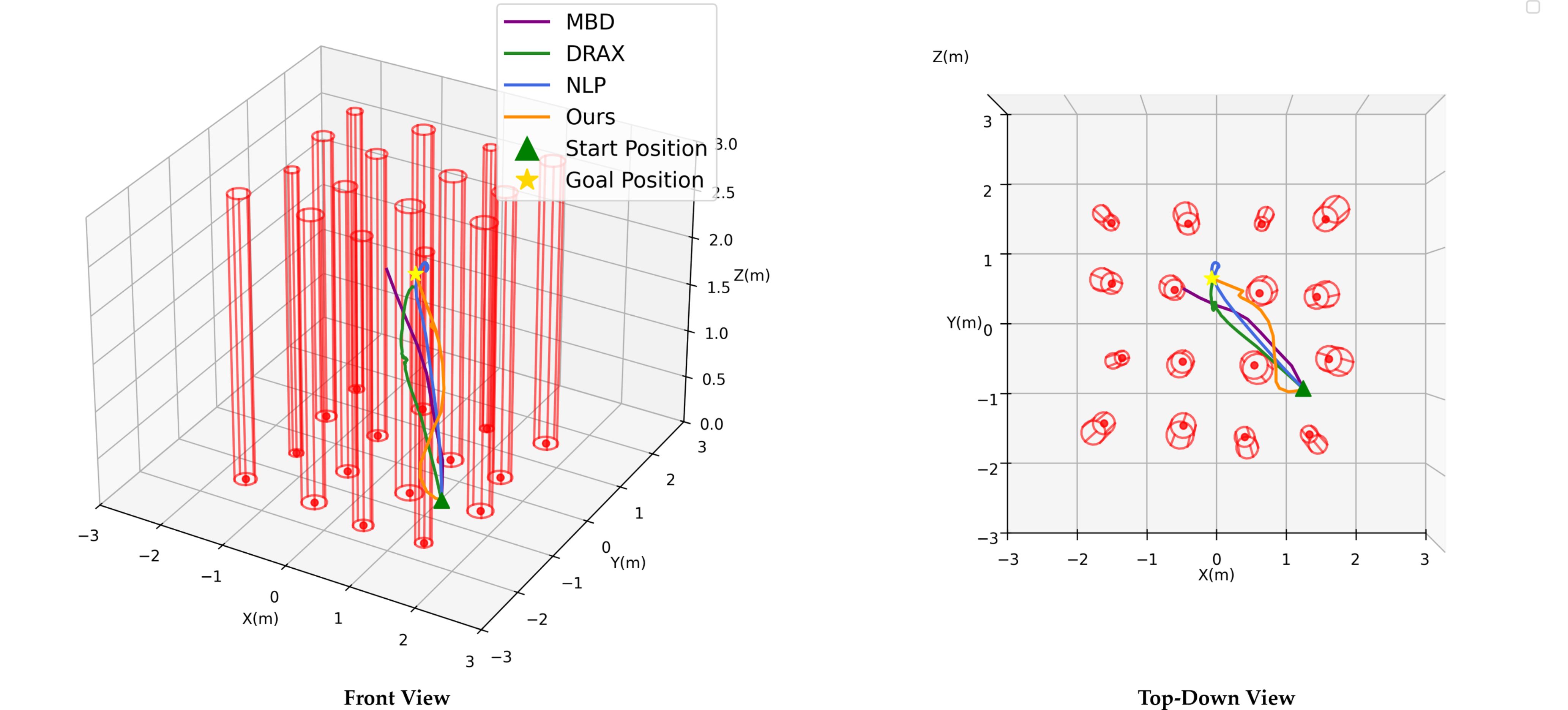
实验结果表明,PAD-TRO在四旋翼飞行器航点导航场景中,与最新的基线方法相比,实现了零动态可行性误差,并且成功率提高了大约4倍。这表明该方法能够有效地解决动态可行性约束问题,并显著提高轨迹优化的性能。
🎯 应用场景
该研究成果可应用于各种需要满足动力学约束的运动规划问题,例如无人机自主导航、机器人运动控制、自动驾驶等。通过显式地保证轨迹的动态可行性,可以提高系统的安全性和可靠性,降低控制难度,并为更复杂的任务规划提供基础。
📄 摘要(原文)
Recently, diffusion models have gained popularity and attention in trajectory optimization due to their capability of modeling multi-modal probability distributions. However, addressing nonlinear equality constraints, i.e, dynamic feasibility, remains a great challenge in diffusion-based trajectory optimization. Recent diffusion-based trajectory optimization frameworks rely on a single-shooting style approach where the denoised control sequence is applied to forward propagate the dynamical system, which cannot explicitly enforce constraints on the states and frequently leads to sub-optimal solutions. In this work, we propose a novel direct trajectory optimization approach via model-based diffusion, which directly generates a sequence of states. To ensure dynamic feasibility, we propose a gradient-free projection mechanism that is incorporated into the reverse diffusion process. Our results show that, compared to a recent state-of-the-art baseline, our approach leads to zero dynamic feasibility error and approximately 4x higher success rate in a quadrotor waypoint navigation scenario involving dense static obstacles.