Stability-Aware Retargeting for Humanoid Multi-Contact Teleoperation
作者: Stephen McCrory, Romeo Orsolino, Dhruv Thanki, Luigi Penco, Robert Griffin
分类: cs.RO
发布日期: 2025-10-05
💡 一句话要点
提出基于质心稳定性的重定向方法,增强人型机器人遥操作的稳定性和鲁棒性
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱八:物理动画 (Physics-based Animation)
关键词: 人形机器人 遥操作 质心稳定性 重定向 多接触 稳定性裕度 梯度优化
📋 核心要点
- 人形机器人遥操作在复杂环境中易受干扰,尤其是在多接触和非共面表面操作时,容易出现稳定性和力矩饱和问题。
- 论文提出一种基于质心稳定性的重定向方法,通过动态调整接触点和姿势,在遥操作过程中实时优化机器人的稳定性。
- 实验结果表明,该方法能有效提高人形机器人的稳定裕度,增强其抗冲击能力和关节力矩裕度,提升遥操作性能。
📝 摘要(中文)
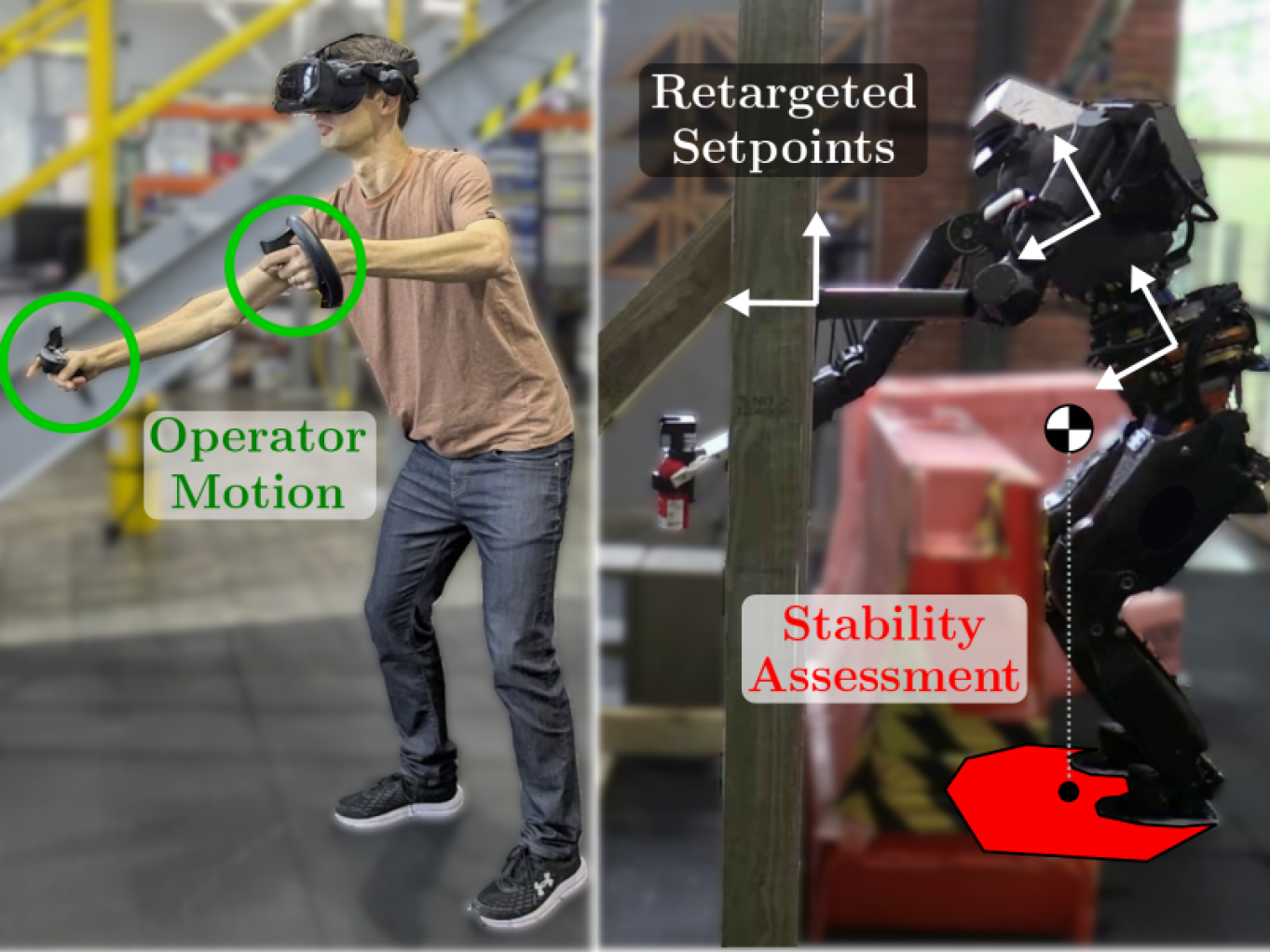
遥操作是生成参考运动并使人形机器人执行各种任务的有效方法。然而,当使用手部接触和非共面表面时,遥操作变得具有挑战性,通常会导致电机扭矩饱和或因滑动而失去稳定性。我们提出了一种基于质心稳定性的重定向方法,该方法在遥操作期间动态调整接触点和姿势,以增强这些困难场景中的稳定性。我们方法的核心是对稳定裕度梯度的有效解析计算。该梯度用于识别稳定性对遥操作设定点高度敏感的场景,并为这些设定点的局部调整提供信息。我们在仿真和硬件中通过遥操作人形机器人上的操作任务来验证该框架,证明了稳定裕度的提高。我们还通过实验证明,更高的稳定裕度与改进的抗冲击性和关节扭矩裕度相关。
🔬 方法详解
问题定义:人形机器人遥操作在复杂环境中,尤其是在多接触和非共面表面操作时,容易出现稳定性和力矩饱和问题。现有的遥操作方法往往难以保证机器人在这些场景下的稳定性和鲁棒性,容易导致任务失败。现有方法缺乏对稳定性的实时优化,无法根据环境变化动态调整机器人的姿态和接触点。
核心思路:论文的核心思路是利用质心稳定性裕度作为优化目标,在遥操作过程中实时调整机器人的接触点和姿势,从而提高机器人的稳定性和鲁棒性。通过计算稳定裕度梯度,可以快速识别对稳定性影响最大的遥操作设定点,并进行局部调整。
技术框架:该方法的技术框架主要包括以下几个模块:1) 遥操作设定点获取:通过遥操作设备获取机器人的目标姿态和接触点。2) 质心稳定性裕度计算:根据机器人的当前状态和环境信息,计算质心稳定性裕度。3) 稳定裕度梯度计算:计算稳定裕度对遥操作设定点的梯度。4) 设定点调整:根据稳定裕度梯度,对遥操作设定点进行局部调整,以提高稳定裕度。5) 运动控制:根据调整后的设定点,控制机器人执行运动。
关键创新:该方法最重要的技术创新点在于提出了稳定裕度梯度的解析计算方法。与传统的数值计算方法相比,解析计算方法更加高效,能够满足实时性的要求。此外,该方法还能够根据稳定裕度梯度,自适应地调整遥操作设定点,从而提高机器人的稳定性和鲁棒性。
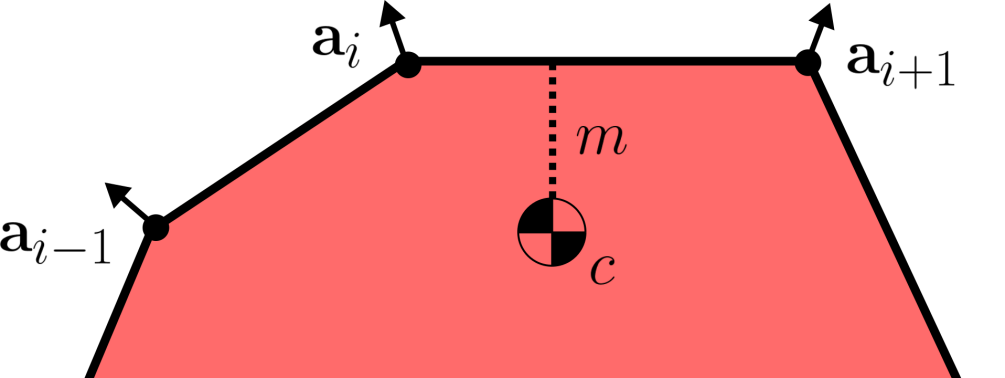
关键设计:该方法的关键设计包括:1) 稳定裕度的定义:采用质心投影到支撑多边形的距离作为稳定裕度的度量。2) 稳定裕度梯度的解析计算:利用动力学方程和几何关系,推导出稳定裕度对遥操作设定点的解析表达式。3) 设定点调整策略:采用梯度下降法,对遥操作设定点进行局部调整,以提高稳定裕度。4) 约束条件:在设定点调整过程中,需要考虑机器人的关节力矩限制和环境约束。
🖼️ 关键图片

📊 实验亮点
在仿真和硬件实验中,该方法成功地提高了人形机器人的稳定裕度。实验结果表明,与传统的遥操作方法相比,该方法能够显著提高机器人的抗冲击能力和关节力矩裕度。例如,在相同的冲击力下,采用该方法的机器人能够保持稳定,而传统方法则容易发生倾倒。此外,该方法还能够降低关节力矩的峰值,从而延长机器人的使用寿命。
🎯 应用场景
该研究成果可应用于各种复杂环境下的机器人遥操作任务,例如灾难救援、核电站维护、太空探索等。通过提高机器人的稳定性和鲁棒性,可以使其在这些危险或难以到达的环境中安全可靠地执行任务。未来,该技术有望与增强现实、虚拟现实等技术结合,实现更加直观和高效的机器人遥操作。
📄 摘要(原文)
Teleoperation is a powerful method to generate reference motions and enable humanoid robots to perform a broad range of tasks. However, teleoperation becomes challenging when using hand contacts and non-coplanar surfaces, often leading to motor torque saturation or loss of stability through slipping. We propose a centroidal stability-based retargeting method that dynamically adjusts contact points and posture during teleoperation to enhance stability in these difficult scenarios. Central to our approach is an efficient analytical calculation of the stability margin gradient. This gradient is used to identify scenarios for which stability is highly sensitive to teleoperation setpoints and inform the local adjustment of these setpoints. We validate the framework in simulation and hardware by teleoperating manipulation tasks on a humanoid, demonstrating increased stability margins. We also demonstrate empirically that higher stability margins correlate with improved impulse resilience and joint torque margin.