COVER:COverage-VErified Roadmaps for Fixed-time Motion Planning in Continuous Semi-Static Environments
作者: Niranjan Kumar Ilampooranan, Constantinos Chamzas
分类: cs.RO
发布日期: 2025-10-04
💡 一句话要点
COVER:面向半静态环境固定时间运动规划的覆盖验证路径图
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 运动规划 半静态环境 固定时间规划 覆盖验证 机器人
📋 核心要点
- 现有半静态环境运动规划方法缺乏形式保证或依赖于障碍物配置的限制性离散化,限制了其在实际场景中的应用。
- COVER框架通过划分障碍物配置空间并验证每个分区内的路径可行性,从而保证在已验证区域内的固定时间运动规划。
- 实验结果表明,COVER在7自由度Panda机器人任务中,相比现有方法实现了更广的覆盖范围和更高的查询成功率。
📝 摘要(中文)
在固定时间内响应运动规划查询对于机器人系统的广泛部署至关重要。半静态环境(其中大多数障碍物保持静态,但有限的障碍物可能随查询而变化)表现出结构化的可变性,可以系统地利用这种可变性来提供比一般运动规划问题更强的保证。然而,现有方法要么缺乏形式保证,要么依赖于对障碍物配置的限制性离散化,从而限制了它们在实际领域中的适用性。本文介绍了一种新颖的框架COVER,用于在半静态环境中增量构建覆盖验证的路径图。通过划分障碍物配置空间并求解每个分区内的可行路径,COVER系统地验证了每个分区中路径图的可行性,并保证了已验证区域内的固定时间运动规划查询。我们使用7自由度模拟的Panda机器人执行桌面和货架任务来验证COVER,结果表明COVER比现有工作实现了更广泛的覆盖范围和更高的查询成功率。
🔬 方法详解
问题定义:论文旨在解决半静态环境中机器人固定时间运动规划问题。现有方法的痛点在于,要么缺乏形式化的可行性保证,要么对障碍物配置空间进行过于简化的离散化,导致在复杂或高维环境中难以应用。这些限制使得机器人难以在实际场景中可靠地执行任务。
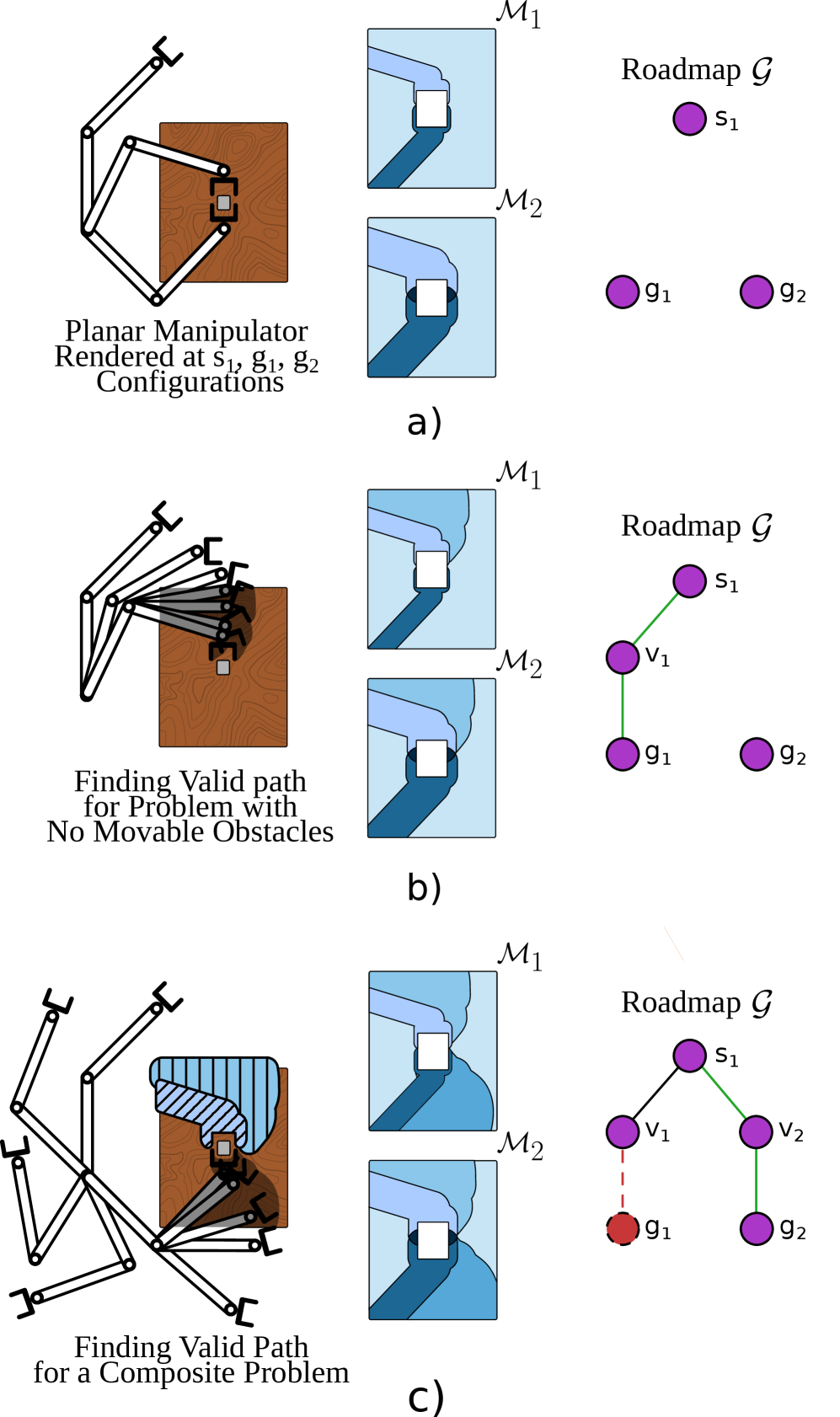
核心思路:COVER的核心思路是通过增量式地构建一个覆盖验证的路径图,该路径图能够保证在特定区域内的运动规划查询可以在固定时间内完成。通过将障碍物配置空间划分为多个分区,并在每个分区内寻找可行的路径,COVER能够系统地验证路径图的可行性,从而提供更强的规划保证。
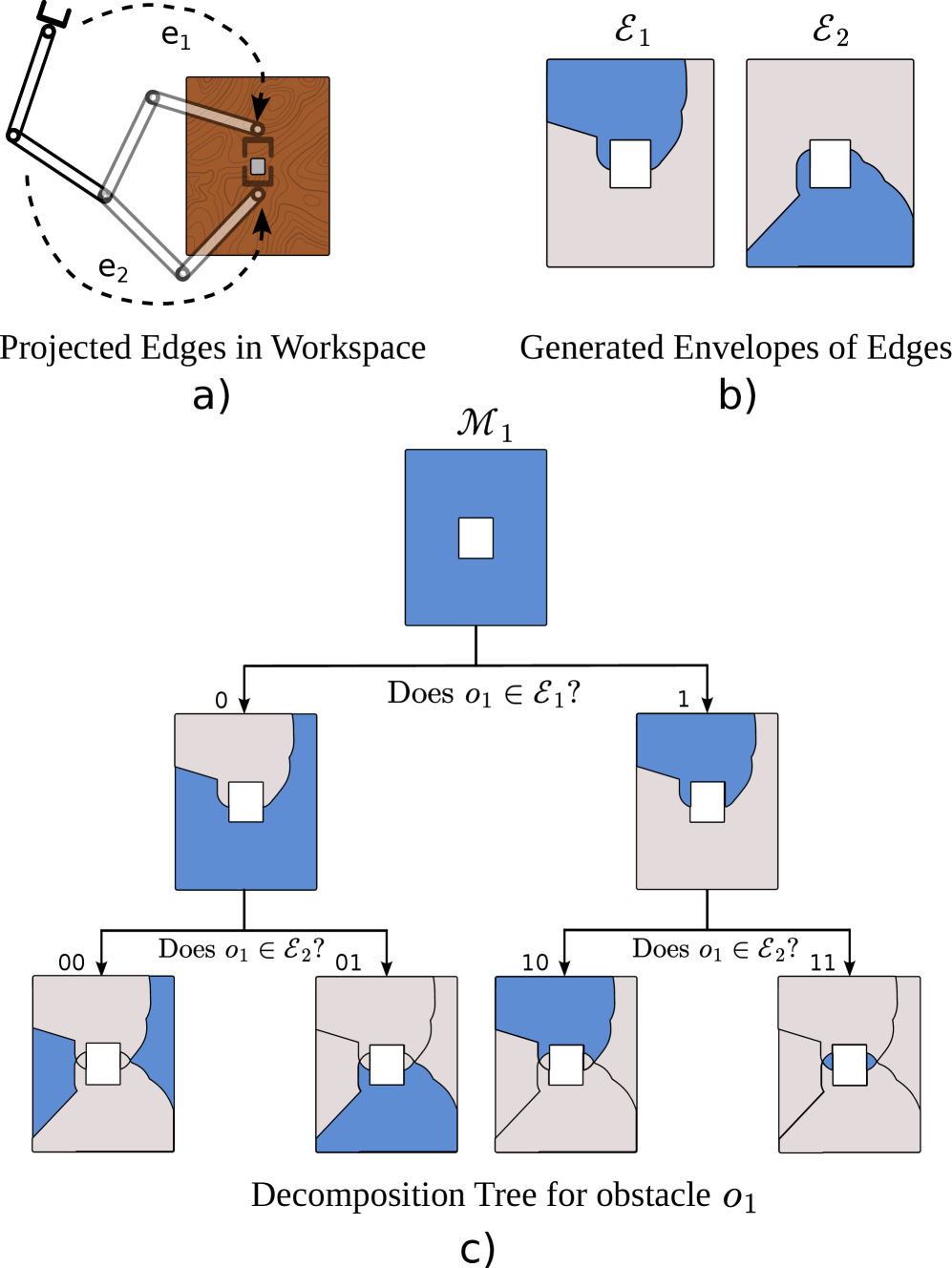
技术框架:COVER框架主要包含以下几个阶段:1) 障碍物配置空间划分:将障碍物配置空间划分为多个小的分区。2) 分区内路径规划:在每个分区内,寻找从起始点到目标点的可行路径。3) 路径验证:验证找到的路径在整个分区内的可行性。4) 路径图构建与更新:将验证过的路径添加到路径图中,并根据新的环境信息更新路径图。
关键创新:COVER的关键创新在于其覆盖验证机制。传统方法通常只验证路径本身的可行性,而COVER则进一步验证路径在整个分区内的可行性,从而提供更强的规划保证。这种覆盖验证机制使得COVER能够在半静态环境中更可靠地进行运动规划。
关键设计:COVER的关键设计包括:1) 障碍物配置空间划分策略:如何有效地划分障碍物配置空间,以平衡计算复杂度和覆盖范围。2) 分区内路径规划算法:选择合适的路径规划算法,以在每个分区内快速找到可行路径。3) 路径验证方法:设计高效的路径验证方法,以确保路径在整个分区内的可行性。具体的参数设置、损失函数、网络结构等技术细节在论文中可能有所涉及,但摘要中未明确提及。
🖼️ 关键图片

📊 实验亮点
实验结果表明,COVER在7自由度Panda机器人执行桌面和货架任务时,相比现有方法实现了更广泛的覆盖范围和更高的查询成功率。具体的性能数据和提升幅度在摘要中未明确给出,但结论表明COVER在实际应用中具有显著优势。
🎯 应用场景
COVER框架适用于需要在半静态环境中进行快速可靠运动规划的机器人应用,例如:仓库自动化、家庭服务机器人、医疗机器人等。该框架能够提高机器人在动态变化环境中的适应性和鲁棒性,使其能够更安全、更高效地完成任务。未来,COVER可以扩展到更复杂的环境和更高维度的机器人系统。
📄 摘要(原文)
Having the ability to answer motion-planning queries within a fixed time budget is critical for the widespread deployment of robotic systems. Semi-static environments, where most obstacles remain static but a limited set can vary across queries, exhibit structured variability that can be systematically exploited to provide stronger guarantees than in general motion-planning problems. However, prior approaches in this setting either lack formal guarantees or rely on restrictive discretizations of obstacle configurations, limiting their applicability in realistic domains. This paper introduces COVER, a novel framework that incrementally constructs a coverage-verified roadmap in semi-static environments. By partitioning the obstacle configuration space and solving for feasible paths within each partition, COVER systematically verifies feasibility of the roadmap in each partition and guarantees fixed-time motion planning queries within the verified regions. We validate COVER with a 7-DOF simulated Panda robot performing table and shelf tasks, demonstrating that COVER achieves broader coverage with higher query success rates than prior works.