LapSurgie: Humanoid Robots Performing Surgery via Teleoperated Handheld Laparoscopy
作者: Zekai Liang, Xiao Liang, Soofiyan Atar, Sreyan Das, Zoe Chiu, Peihan Zhang, Florian Richter, Shanglei Liu, Michael C. Yip
分类: cs.RO
发布日期: 2025-10-03
💡 一句话要点
LapSurgie:提出基于人型机器人的遥操作腹腔镜手术框架
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 人形机器人 遥操作 腹腔镜手术 远程医疗 医疗机器人
📋 核心要点
- 现有手术机器人平台部署受限,导致医疗资源分配不均,尤其是在欠发达地区。
- LapSurgie 提出了一种基于人形机器人的腹腔镜遥操作框架,无需额外基础设施改造即可在现有手术室中使用。
- 用户研究验证了该框架的有效性,初步证明了人形机器人在腹腔镜手术中部署的可行性。
📝 摘要(中文)
近年来,机器人腹腔镜手术因其在微创手术中提供更高效率和精确度的潜力而受到越来越多的关注。然而,手术机器人平台的应用主要集中在高资源医疗中心,加剧了农村和低资源地区医疗保健的不平等。为了弥合这一差距,人们探索了从远程指导到完全远程手术的各种解决方案。然而,将手术机器人系统实际部署到服务欠发达社区仍然是一个未解决的挑战。人形系统为可部署性提供了一条有希望的途径,因为它们可以直接在为人类设计的环境中操作,而无需进行大量的基础设施改造,包括手术室。在这项工作中,我们介绍了LapSurgie,这是第一个基于人形机器人的腹腔镜遥操作框架。该系统利用逆映射策略,用于手动腕式腹腔镜器械,该策略遵守远程运动中心约束,从而无需额外的设置要求即可实现对现成手术腹腔镜工具的精确手到工具控制。配备立体视觉系统的控制台提供实时视觉反馈。最后,跨平台的综合用户研究证明了所提出框架的有效性,并为在腹腔镜手术中部署人形机器人的可行性提供了初步证据。
🔬 方法详解
问题定义:现有机器人腹腔镜手术系统成本高昂,部署复杂,难以在资源匮乏地区普及。传统手术机器人需要专门的手术室和配套设施,限制了其应用范围。因此,需要一种更灵活、易于部署的解决方案,以解决医疗资源分配不均的问题。
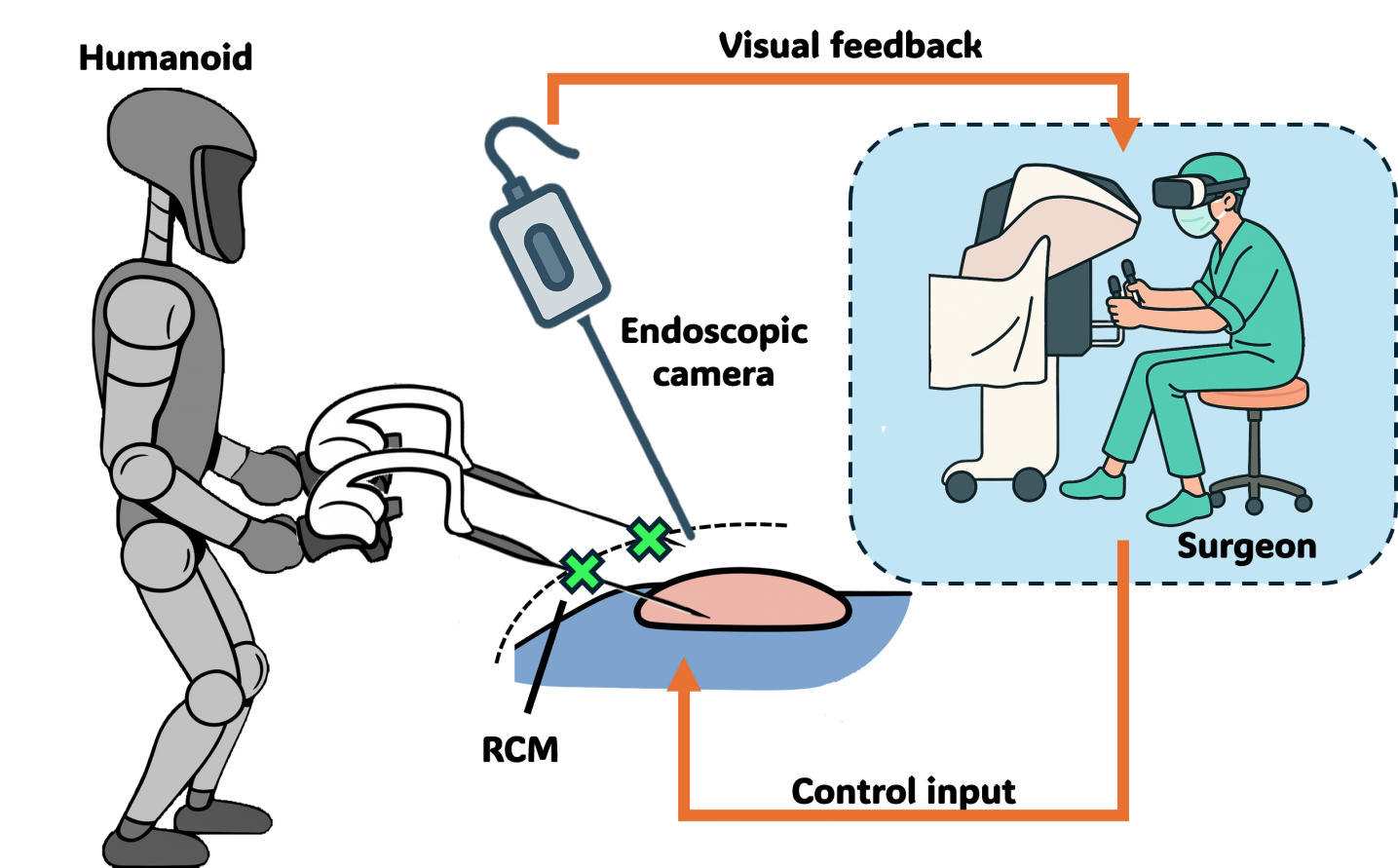
核心思路:LapSurgie 的核心思路是利用人形机器人直接在为人类设计的手术室环境中进行操作,无需进行大规模的基础设施改造。通过遥操作控制,医生可以在控制台远程控制人形机器人进行腹腔镜手术,从而扩展手术机器人的应用范围。
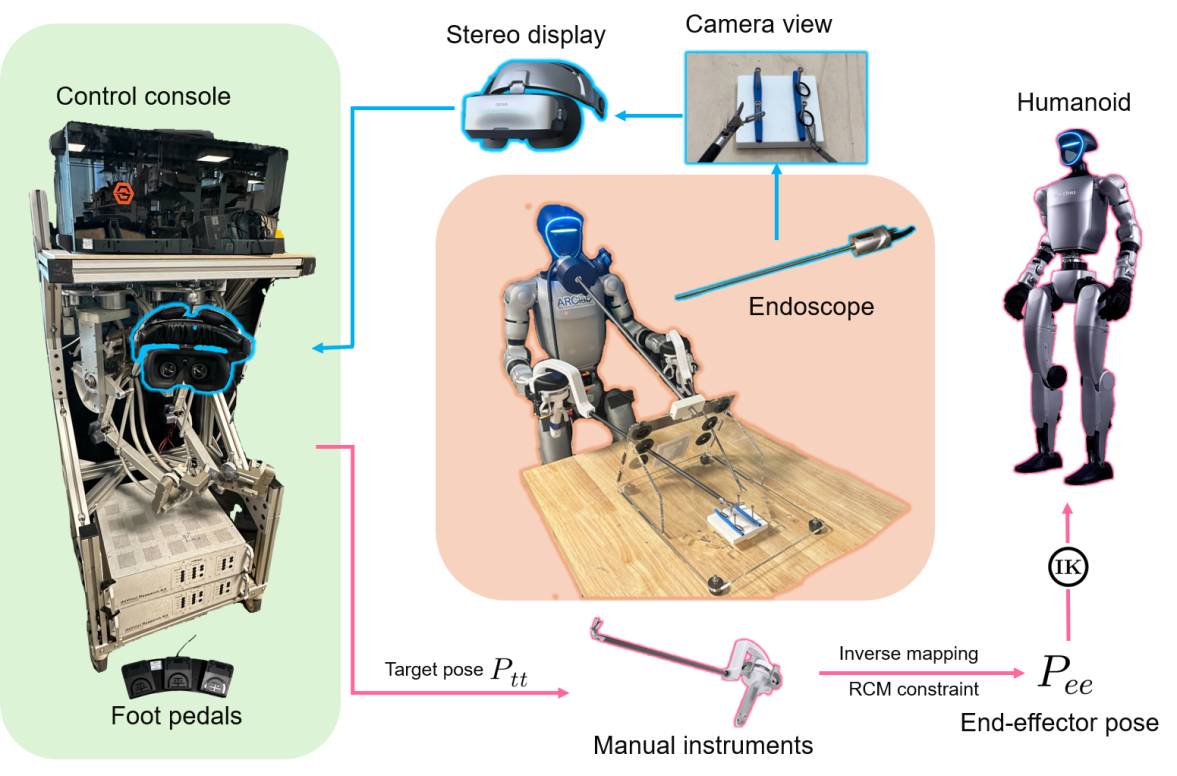
技术框架:LapSurgie 系统主要包括三个部分:人形机器人、遥操作控制台和腹腔镜器械。人形机器人负责执行手术操作,遥操作控制台提供医生控制界面和实时视觉反馈,腹腔镜器械则用于实际的手术操作。医生通过控制台控制人形机器人的运动,机器人根据医生的指令操作腹腔镜器械进行手术。系统采用逆映射策略,将医生的手部运动转化为机器人末端执行器的运动,并保证运动中心约束。
关键创新:LapSurgie 的关键创新在于将人形机器人应用于腹腔镜手术,并设计了一种基于逆映射的遥操作控制方法。这种方法允许医生使用现成的腹腔镜器械,无需进行额外的定制或改造。此外,系统还考虑了远程运动中心约束,保证了手术操作的精确性和安全性。
关键设计:系统采用立体视觉系统提供实时视觉反馈,帮助医生更好地感知手术环境。逆映射控制算法将医生的手部运动映射到机器人末端执行器的运动,并考虑了运动中心约束。控制台的设计符合人体工程学,方便医生长时间操作。具体参数设置和损失函数等技术细节未在摘要中详细说明,属于未知信息。
🖼️ 关键图片
📊 实验亮点
该研究通过用户研究验证了 LapSurgie 框架的有效性。实验结果表明,医生可以通过该系统成功完成腹腔镜手术操作,并且操作精度和效率与传统手术机器人相当。虽然摘要中没有提供具体的性能数据和对比基线,但用户研究的结果初步证明了人形机器人在腹腔镜手术中部署的可行性。
🎯 应用场景
LapSurgie 有望应用于远程医疗、灾难救援和军事医疗等领域。通过部署在资源匮乏地区的医疗机构或移动医疗车上,该系统可以为当地患者提供高质量的腹腔镜手术服务,缓解医疗资源分配不均的问题。此外,在灾难或战争等紧急情况下,医生可以通过远程控制人形机器人进行手术,减少医护人员的伤亡风险。
📄 摘要(原文)
Robotic laparoscopic surgery has gained increasing attention in recent years for its potential to deliver more efficient and precise minimally invasive procedures. However, adoption of surgical robotic platforms remains largely confined to high-resource medical centers, exacerbating healthcare disparities in rural and low-resource regions. To close this gap, a range of solutions has been explored, from remote mentorship to fully remote telesurgery. Yet, the practical deployment of surgical robotic systems to underserved communities remains an unsolved challenge. Humanoid systems offer a promising path toward deployability, as they can directly operate in environments designed for humans without extensive infrastructure modifications -- including operating rooms. In this work, we introduce LapSurgie, the first humanoid-robot-based laparoscopic teleoperation framework. The system leverages an inverse-mapping strategy for manual-wristed laparoscopic instruments that abides to remote center-of-motion constraints, enabling precise hand-to-tool control of off-the-shelf surgical laparoscopic tools without additional setup requirements. A control console equipped with a stereo vision system provides real-time visual feedback. Finally, a comprehensive user study across platforms demonstrates the effectiveness of the proposed framework and provides initial evidence for the feasibility of deploying humanoid robots in laparoscopic procedures.