Digital-Twin Evaluation for Proactive Human-Robot Collision Avoidance via Prediction-Guided A-RRT*
作者: Vadivelan Murugesan, Rajasundaram Mathiazhagan, Sanjana Joshi, Aliasghar Arab
分类: cs.RO
发布日期: 2025-10-03
💡 一句话要点
提出一种基于预测引导A-RRT*的数字孪生评估方法,用于人机协作中的主动避障。
🎯 匹配领域: 支柱七:动作重定向 (Motion Retargeting) 支柱八:物理动画 (Physics-based Animation)
关键词: 人机协作 主动避障 运动预测 数字孪生 A-RRT* CNN-BiLSTM 人工势场
📋 核心要点
- 现有的人机协作避障方法依赖于运动学模型,难以应对复杂动态环境下的碰撞风险。
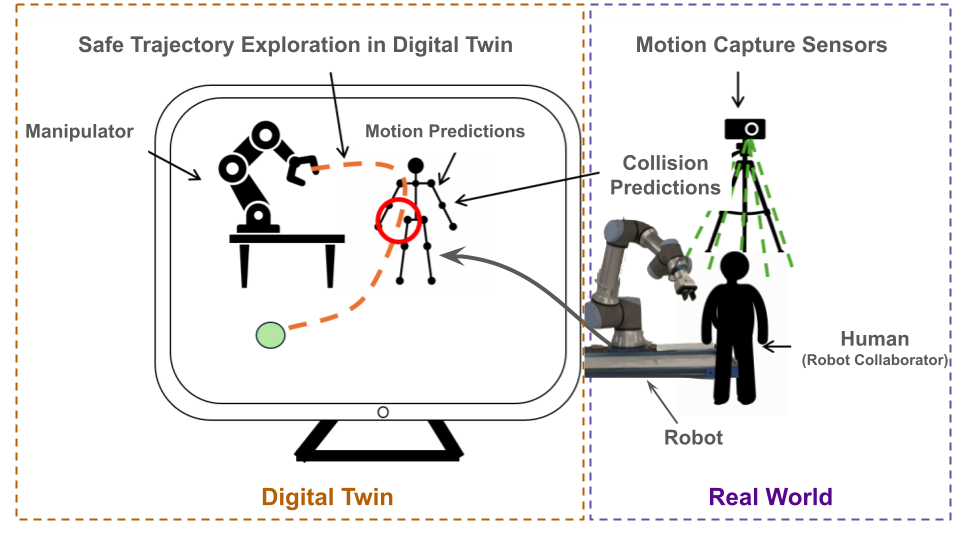
- 该论文提出一种预测驱动的安全规划框架,利用数字孪生验证的细粒度人体运动预测。
- 实验结果表明,该方法能实现100%的主动避障,间隙大于250mm,重规划时间小于2s。
📝 摘要(中文)
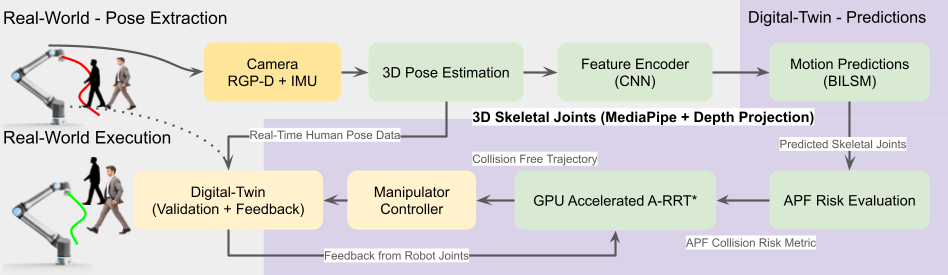
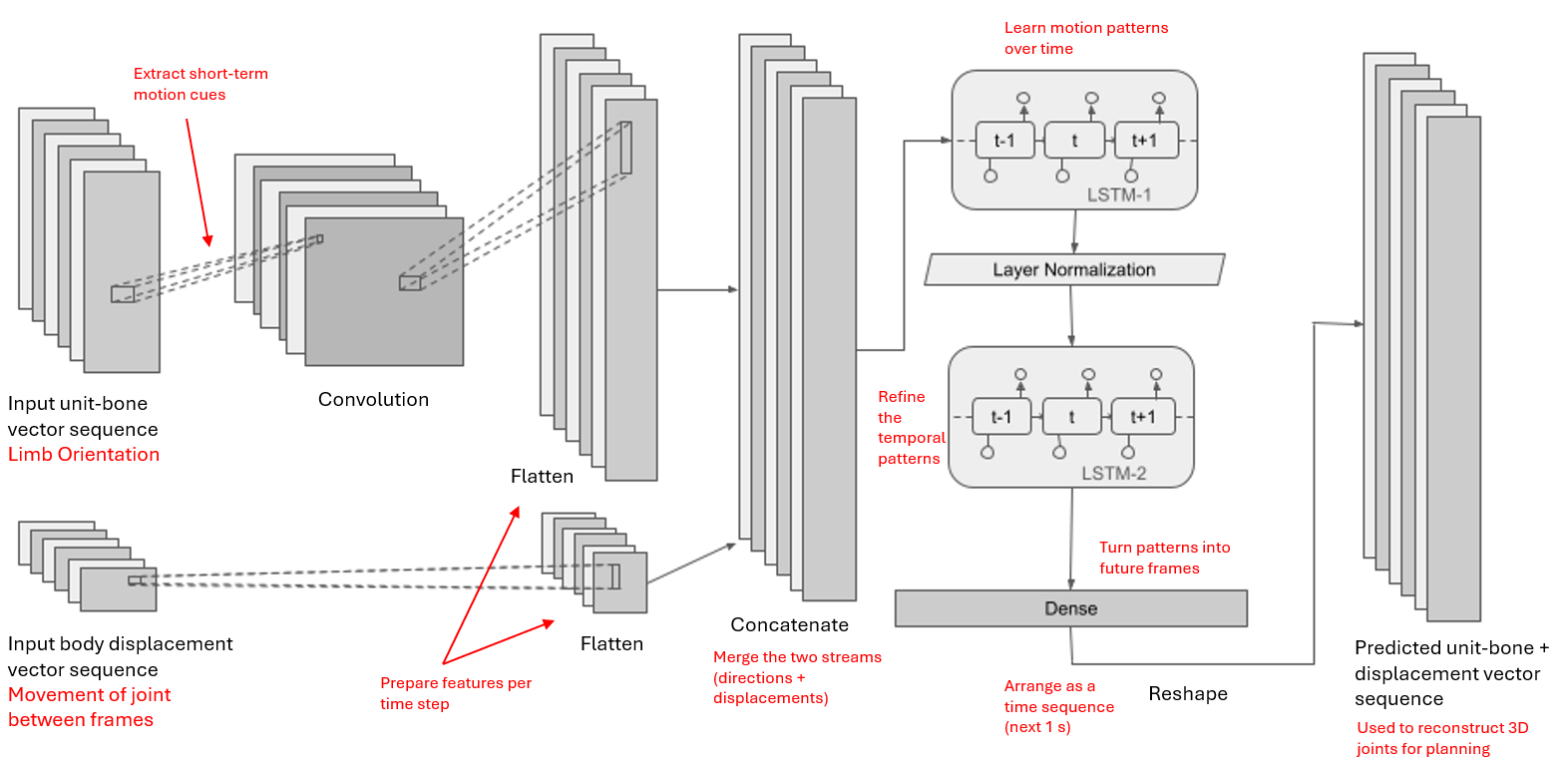
人机协作需要精确预测人类在较长时间范围内的运动,以实现主动避障。与仅依赖运动学模型的现有规划器不同,本文提出了一种预测驱动的安全规划框架,该框架利用在基于物理的数字孪生中验证的细粒度、逐关节的人体运动预测。基于胶囊的人工势场(APF)将这些细粒度预测转换为碰撞风险指标,当超过阈值时,触发自适应RRT(A-RRT)规划器。使用深度相机提取3D骨骼姿势,并使用卷积神经网络-双向长短期记忆(CNN-BiLSTM)模型提前预测各个关节轨迹。数字孪生模型集成了实时人体姿势预测,并将其置于模拟机器人前方,以评估运动和物理接触。所提出的方法能够提前验证规划的轨迹,并弥合实时更新规划轨迹中的潜在延迟。在50次试验中,该方法实现了100%的主动避障,间隙大于250毫米,重新规划时间小于2秒,通过将预测性人体建模与数字孪生验证相结合,与现有的仅基于运动学的规划器相比,表现出卓越的精度和可靠性。
🔬 方法详解
问题定义:论文旨在解决人机协作场景中,机器人如何根据人类运动预测进行主动避障的问题。现有方法主要依赖于机器人的运动学模型,对人类行为的预测能力不足,难以应对复杂和动态的环境,容易发生碰撞。
核心思路:论文的核心思路是利用深度学习模型预测人类的运动轨迹,并将这些预测结果融入到机器人的路径规划中。通过数字孪生技术,在虚拟环境中验证规划的轨迹,从而提高避障的可靠性和安全性。这种方法将预测性人体建模与数字孪生验证相结合,弥补了传统方法在预测和验证方面的不足。
技术框架:整体框架包含以下几个主要模块:1) 使用深度相机获取人类的3D骨骼姿势;2) 使用CNN-BiLSTM模型预测人类各个关节的运动轨迹;3) 使用基于胶囊的人工势场(APF)将预测的关节轨迹转换为碰撞风险指标;4) 当碰撞风险超过阈值时,触发自适应RRT(A-RRT)规划器进行路径规划;5) 使用数字孪生模型验证规划的轨迹,确保安全性和可行性。
关键创新:论文的关键创新在于:1) 提出了一种基于细粒度人体运动预测的主动避障方法,能够更准确地预测人类行为;2) 将数字孪生技术应用于人机协作的路径规划中,实现了在虚拟环境中验证轨迹的安全性;3) 结合CNN-BiLSTM模型和自适应RRT*规划器,提高了预测和规划的效率和精度。与现有方法相比,该方法能够更有效地避免碰撞,并提高人机协作的安全性。
关键设计:CNN-BiLSTM模型的具体结构和训练方式未知,但推测使用了大量的人体运动数据进行训练,以提高预测的准确性。A-RRT*规划器的自适应性体现在其能够根据碰撞风险动态调整搜索策略,从而更快地找到安全的路径。基于胶囊的人工势场(APF)的具体实现方式未知,但其作用是将预测的关节轨迹转换为机器人可以理解的碰撞风险指标。
🖼️ 关键图片
📊 实验亮点
在50次试验中,该方法实现了100%的主动避障,机器人与人类之间的间隙大于250毫米,重新规划时间小于2秒。这些结果表明,该方法在人机协作避障方面具有显著的优势,能够有效地避免碰撞,并保证机器人的运动效率。与现有的仅基于运动学的规划器相比,该方法通过结合预测性人体建模和数字孪生验证,提高了避障的精度和可靠性。
🎯 应用场景
该研究成果可应用于各种人机协作场景,例如:工业自动化、医疗康复、家庭服务等。在工业自动化中,机器人可以根据工人的动作预测,主动避让,提高生产效率和安全性。在医疗康复领域,机器人可以辅助患者进行康复训练,并根据患者的运动能力进行个性化调整。在家庭服务中,机器人可以安全地与人类互动,提供各种便利服务。该研究有助于推动人机协作技术的发展,实现更安全、高效、智能的人机交互。
📄 摘要(原文)
Human-robot collaboration requires precise prediction of human motion over extended horizons to enable proactive collision avoidance. Unlike existing planners that rely solely on kinodynamic models, we present a prediction-driven safe planning framework that leverages granular, joint-by-joint human motion forecasting validated in a physics-based digital twin. A capsule-based artificial potential field (APF) converts these granular predictions into collision risk metrics, triggering an Adaptive RRT (A-RRT) planner when thresholds are exceeded. The depth camera is used to extract 3D skeletal poses and a convolutional neural network-bidirectional long short-term memory (CNN-BiLSTM) model to predict individual joint trajectories ahead of time. A digital twin model integrates real-time human posture prediction placed in front of a simulated robot to evaluate motions and physical contacts. The proposed method enables validation of planned trajectories ahead of time and bridging potential latency gaps in updating planned trajectories in real-time. In 50 trials, our method achieved 100% proactive avoidance with > 250 mm clearance and sub-2 s replanning, demonstrating superior precision and reliability compared to existing kinematic-only planners through the integration of predictive human modeling with digital twin validation.