Warm-Starting Optimization-Based Motion Planning for Robotic Manipulators via Point Cloud-Conditioned Flow Matching
作者: Sibo Tian, Minghui Zheng, Xiao Liang
分类: cs.RO
发布日期: 2025-10-03
💡 一句话要点
提出基于点云条件Flow Matching的机器人操作臂运动规划优化方法
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture) 支柱四:生成式动作 (Generative Motion) 支柱七:动作重定向 (Motion Retargeting) 支柱八:物理动画 (Physics-based Animation)
关键词: 机器人运动规划 Flow Matching 点云 轨迹优化 人机协作
📋 核心要点
- 现有基于采样的运动规划器难以扩展到高维构型空间,且需要后处理,效率较低。
- 论文提出一种基于点云条件Flow Matching模型的学习方法,为优化器提供近优初始化。
- 实验表明,该方法提高了轨迹优化成功率,减少了迭代次数,并具有良好的泛化能力。
📝 摘要(中文)
本文提出了一种新的基于学习的方法,该方法利用以单视角点云为条件的Flow Matching模型来学习优化初始化的近优解。该方法不需要环境的先验知识,例如障碍物的位置和几何形状,并且可以直接从单视角深度相机输入生成可行的轨迹。在杂乱工作空间中的UR5e机器人操作臂的仿真研究表明,所提出的生成初始化器自身实现了很高的成功率,与传统的和基于学习的基准初始化器相比,显著提高了轨迹优化的成功率,需要的优化迭代次数更少,并且对未见环境表现出很强的泛化能力。
🔬 方法详解
问题定义:现有的基于优化的运动规划器虽然能够直接生成平滑轨迹并考虑多种约束,但对初始化非常敏感,容易陷入局部最小值。传统的初始化方法和一些基于学习的初始化方法在复杂环境中表现不佳,导致优化失败或需要大量的迭代次数。
核心思路:论文的核心思路是利用Flow Matching模型学习一个从点云到机器人构型空间的映射,从而生成接近最优解的初始化。通过将单视角点云作为条件,Flow Matching模型能够学习到环境的几何信息,并生成避开障碍物的可行轨迹,为优化器提供良好的起点。
技术框架:该方法主要包含两个阶段:1) 使用单视角深度相机获取环境的点云数据;2) 将点云数据输入到训练好的Flow Matching模型中,生成初始轨迹;3) 使用优化器对初始轨迹进行优化,得到最终的运动轨迹。Flow Matching模型以点云为条件,学习从随机噪声到可行轨迹的映射。
关键创新:该方法的主要创新在于使用Flow Matching模型学习优化器的初始化。与传统的初始化方法相比,该方法能够利用环境的几何信息生成更接近最优解的初始化,从而提高优化器的成功率和效率。与现有的基于学习的初始化方法相比,该方法不需要环境的先验知识,可以直接从单视角点云生成可行轨迹。
关键设计:Flow Matching模型使用Transformer网络作为主干网络,以点云作为输入,预测每个时间步的运动方向。损失函数采用Flow Matching损失,鼓励模型学习到从随机噪声到可行轨迹的连续映射。优化器采用常见的优化算法,如L-BFGS或IPOPT,并根据具体任务设置约束条件,如避免碰撞、关节限制等。
🖼️ 关键图片


📊 实验亮点
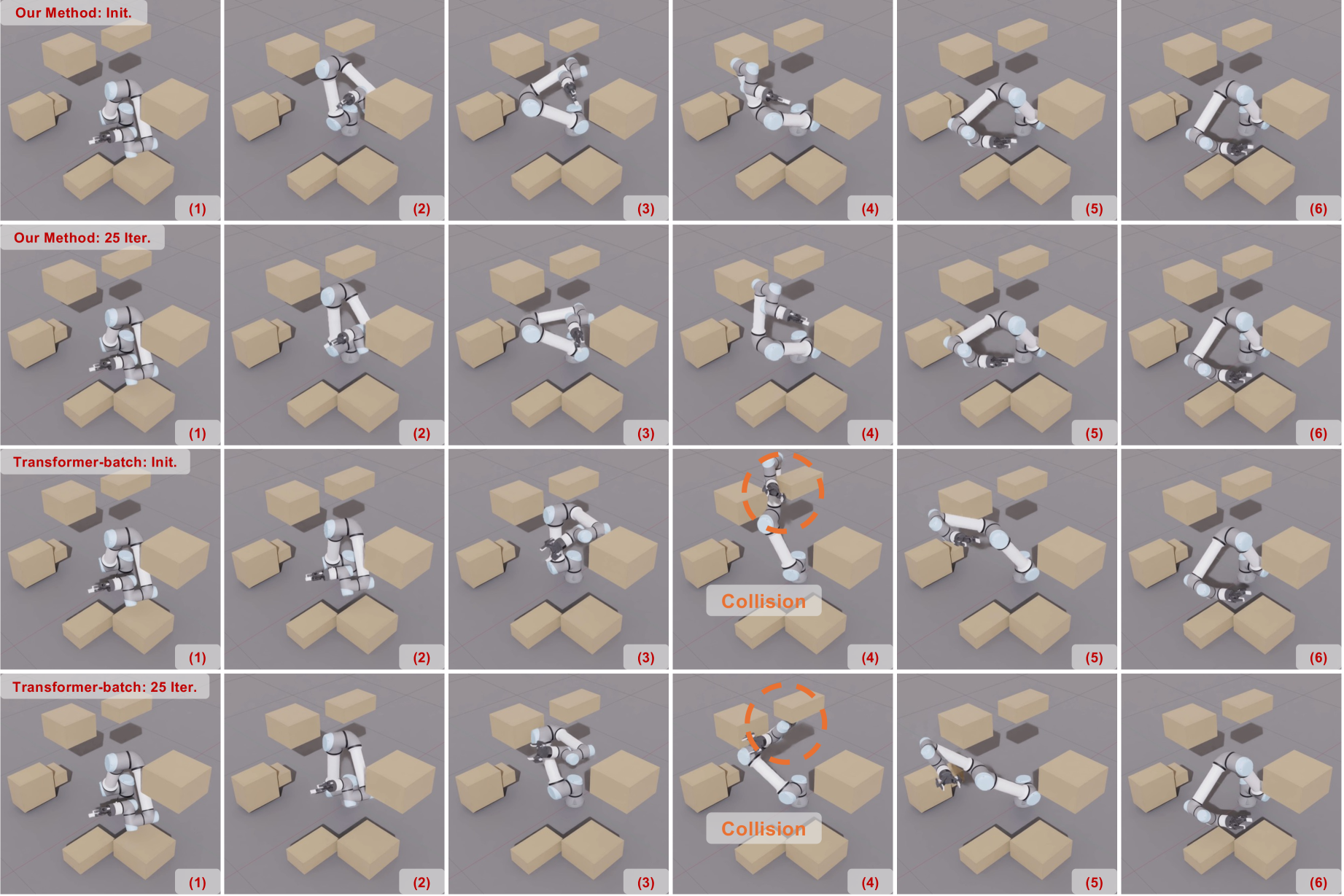
实验结果表明,该方法在UR5e机器人操作臂的仿真环境中取得了显著的性能提升。与传统的和基于学习的基准初始化器相比,该方法显著提高了轨迹优化的成功率,并减少了优化迭代次数。此外,该方法还表现出对未见环境的良好泛化能力,表明其具有很强的实用价值。
🎯 应用场景
该研究成果可应用于人机协作系统、自动驾驶、医疗机器人等领域。在人机协作中,机器人需要实时响应动态环境并重新规划运动轨迹,以确保安全交互和高效的任务执行。该方法能够快速生成可行的运动轨迹,提高机器人的响应速度和安全性。在自动驾驶和医疗机器人领域,该方法可以用于规划车辆或手术机器人的运动轨迹,避免碰撞并实现精确控制。
📄 摘要(原文)
Rapid robot motion generation is critical in Human-Robot Collaboration (HRC) systems, as robots need to respond to dynamic environments in real time by continuously observing their surroundings and replanning their motions to ensure both safe interactions and efficient task execution. Current sampling-based motion planners face challenges in scaling to high-dimensional configuration spaces and often require post-processing to interpolate and smooth the generated paths, resulting in time inefficiency in complex environments. Optimization-based planners, on the other hand, can incorporate multiple constraints and generate smooth trajectories directly, making them potentially more time-efficient. However, optimization-based planners are sensitive to initialization and may get stuck in local minima. In this work, we present a novel learning-based method that utilizes a Flow Matching model conditioned on a single-view point cloud to learn near-optimal solutions for optimization initialization. Our method does not require prior knowledge of the environment, such as obstacle locations and geometries, and can generate feasible trajectories directly from single-view depth camera input. Simulation studies on a UR5e robotic manipulator in cluttered workspaces demonstrate that the proposed generative initializer achieves a high success rate on its own, significantly improves the success rate of trajectory optimization compared with traditional and learning-based benchmark initializers, requires fewer optimization iterations, and exhibits strong generalization to unseen environments.