Optimal swimming with body compliance in an overdamped medium
作者: Jianfeng Lin, Tianyu Wang, Baxi Chong, Matthew Fernandez, Zhaochen Xu, Daniel I. Goldman
分类: cs.RO, physics.app-ph
发布日期: 2025-10-03 (更新: 2025-10-20)
💡 一句话要点
提出基于几何力学的柔顺游泳机器人优化框架,实现颗粒介质中的高效运动。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 柔顺机器人 几何力学 游泳运动 颗粒介质 运动优化
📋 核心要点
- 现有方法难以有效控制柔顺机器人在复杂环境中的运动,尤其是在高阻尼介质中,缺乏对柔顺性与运动性能之间关系的深入理解。
- 本研究将几何力学与柔顺机构相结合,通过优化关节处的柔顺性,寻找在颗粒介质中实现最大位移的最优游泳策略。
- 实验验证了该框架在预测和优化柔顺游泳机器人运动性能方面的准确性,证明了柔顺性可作为一种设计特征,提升机器人在复杂环境中的运动能力。
📝 摘要(中文)
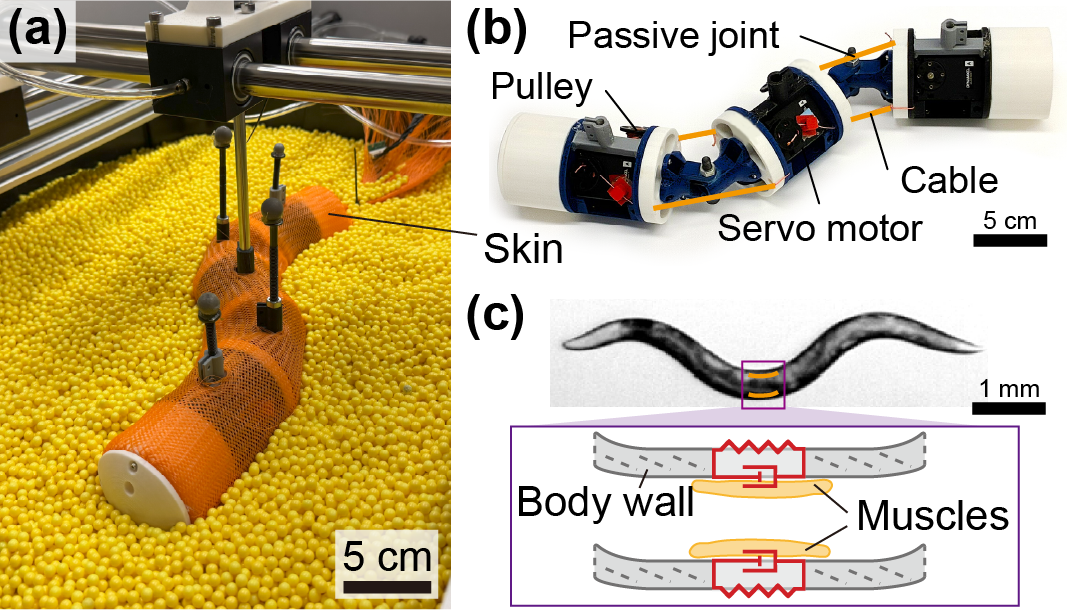
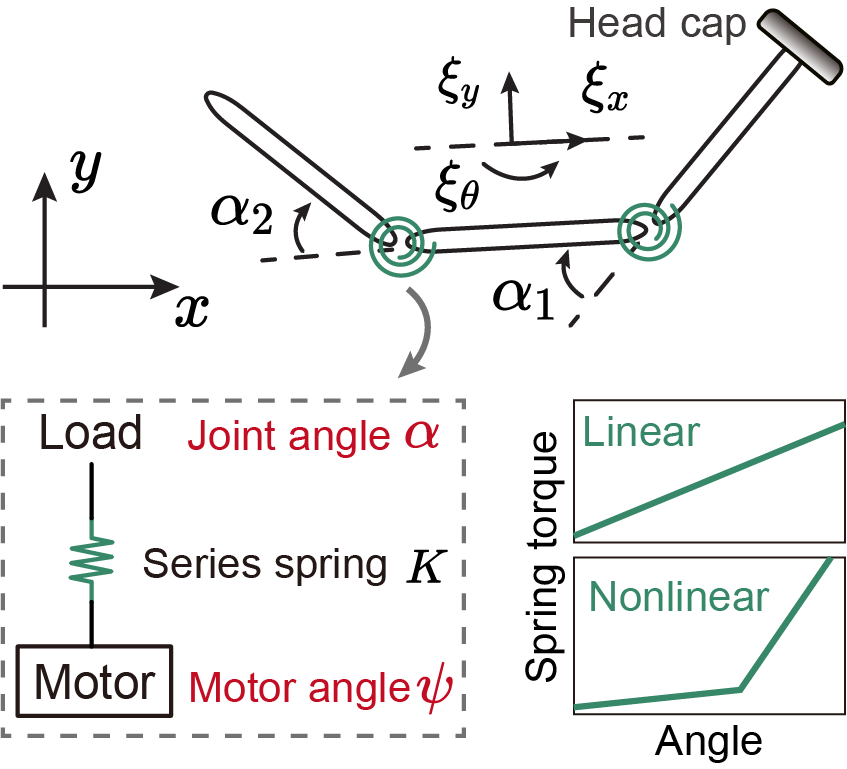
本文提出了一种基于几何力学的框架,用于预测柔顺游泳器的运动性能并寻找最优游泳策略。通过在关节处加入串联弹簧,扩展了Purcell三连杆游泳器的柔顺性。利用阻力理论推导了身体动力学。将几何力学融入运动预测和优化框架中,以确定控制柔顺游泳器实现最大位移的策略。在物理电缆驱动的三连杆无腿机器人上验证了该框架,并展示了在颗粒介质中,针对不同编程和状态相关的柔顺性,对运动性能的准确预测和优化。研究结果建立了一种系统的、基于物理的建模和控制柔顺游泳运动的方法,突出了柔顺性作为一种设计特征,可用于在均质和异质环境中实现鲁棒运动。
🔬 方法详解
问题定义:论文旨在解决柔顺游泳机器人在高阻尼介质(如颗粒介质)中的运动控制问题。现有方法难以充分利用机器人的柔顺性来优化运动性能,缺乏有效的建模和控制框架,无法准确预测和优化机器人在复杂环境下的运动轨迹。
核心思路:论文的核心思路是将几何力学与柔顺机构相结合,通过优化机器人的形状变化模式(步态)和关节柔顺性,实现在高阻尼介质中的高效运动。几何力学提供了一种将形状变化与运动位移联系起来的框架,而柔顺性则允许机器人适应环境变化,提高运动的鲁棒性。
技术框架:该框架包含以下主要模块:1) 基于阻力理论的身体动力学建模,用于描述机器人与环境之间的相互作用;2) 基于几何力学的运动预测模型,用于预测给定步态和柔顺性下的运动位移;3) 优化算法,用于搜索最优的步态和柔顺性参数,以实现最大位移。整体流程为:首先,建立机器人的动力学模型;然后,利用几何力学预测运动性能;最后,通过优化算法寻找最优控制策略。
关键创新:最重要的技术创新点在于将几何力学与柔顺机构相结合,并将其应用于柔顺游泳机器人的运动控制。与传统方法相比,该方法能够更准确地预测和优化机器人在复杂环境下的运动性能,并充分利用柔顺性来提高运动的鲁棒性。
关键设计:论文的关键设计包括:1) 在Purcell三连杆游泳器的关节处引入串联弹簧,以实现柔顺性;2) 使用阻力理论来描述机器人与颗粒介质之间的相互作用;3) 利用优化算法(具体算法未知)搜索最优的步态和柔顺性参数。具体的参数设置和损失函数等技术细节在论文中可能有所描述,但摘要中未明确提及。
🖼️ 关键图片

📊 实验亮点
该研究在物理电缆驱动的三连杆无腿机器人上验证了所提出的框架,并展示了在颗粒介质中,针对不同编程和状态相关的柔顺性,对运动性能的准确预测和优化。实验结果表明,该框架能够有效地预测和优化柔顺游泳机器人的运动性能,并证明了柔顺性可作为一种设计特征,提升机器人在复杂环境中的运动能力。具体的性能数据和提升幅度在摘要中未给出。
🎯 应用场景
该研究成果可应用于开发新型柔顺机器人,用于在复杂和非结构化环境中执行任务,例如搜救、勘探和环境监测。通过优化机器人的柔顺性和运动策略,可以提高其在颗粒介质、泥浆或其他高阻尼介质中的运动能力和适应性,从而扩展机器人的应用范围。
📄 摘要(原文)
Elongate animals and robots use undulatory body waves to locomote through diverse environments. Geometric mechanics provides a framework to model and optimize such systems in highly damped environments, connecting a prescribed shape change pattern (gait) with locomotion displacement. However, the practical applicability of controlling compliant physical robots remains to be demonstrated. In this work, we develop a framework based on geometric mechanics to predict locomotor performance and search for optimal swimming strategies of compliant swimmers. We introduce a compliant extension of Purcell's three-link swimmer by incorporating series-connected springs at the joints. Body dynamics are derived using resistive force theory. Geometric mechanics is incorporated into movement prediction and into an optimization framework that identifies strategies for controlling compliant swimmers to achieve maximal displacement. We validate our framework on a physical cable-driven three-link limbless robot and demonstrate accurate prediction and optimization of locomotor performance under varied programmed, state-dependent compliance in a granular medium. Our results establish a systematic, physics-based approach for modeling and controlling compliant swimming locomotion, highlighting compliance as a design feature that can be exploited for robust movement in both homogeneous and heterogeneous environments.