Embracing Evolution: A Call for Body-Control Co-Design in Embodied Humanoid Robot
作者: Guiliang Liu, Bo Yue, Yi Jin Kim, Kui Jia
分类: cs.RO
发布日期: 2025-10-03
💡 一句话要点
提出人形机器人形体-控制协同设计,提升复杂环境适应性
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 人形机器人 协同设计 具身智能 形态优化 控制策略 Sim2Real 元学习
📋 核心要点
- 现有方法主要关注固定机器人结构的控制策略优化,忽略了机器人形态对性能的影响,限制了其在复杂环境中的适应性。
- 受生物进化启发,论文提出形体-控制协同设计,通过迭代调整机器人形态和控制策略,优化特定任务和资源约束下的性能。
- 论文提出了基于战略探索、Sim2Real迁移和元策略学习的协同设计方法,并从多个角度论证了协同设计的必要性。
📝 摘要(中文)
作为通用物理智能体,人形机器人必须整合智能控制和自适应形态,才能在多样化的真实环境中有效运行。本文提出一种协同设计机制,即同时进化控制策略和人形机器人的物理结构。受生物进化启发,该方法使机器人能够迭代地调整其形态和行为,从而在特定任务和资源约束的环境中优化性能。尽管协同设计具有潜力,但在人形机器人领域仍未被充分探索,引发了关于其在实现真正具身智能中的可行性和必要性的根本性问题。为了应对这些挑战,我们提出了基于战略探索、Sim2Real迁移和元策略学习的实用协同设计方法。我们从方法论、应用驱动和社区导向的角度分析了协同设计的关键作用,并提出了从短期创新到长期目标的一系列开放性研究问题。这项工作将协同设计定位为开发下一代智能和自适应人形智能体的基石。
🔬 方法详解
问题定义:现有的人形机器人研究主要集中在为固定结构的机器人设计控制策略,而忽略了机器人自身的物理形态对于其在复杂环境中表现的影响。这种方法的局限性在于,最优的控制策略高度依赖于特定的机器人结构,导致机器人难以适应新的任务或环境。因此,如何同时优化机器人的形态和控制策略,以提高其在各种环境下的适应性和性能,是一个重要的挑战。
核心思路:本文的核心思路是借鉴生物进化的思想,提出一种形体-控制协同设计方法。该方法允许机器人的形态和控制策略同时进化,从而使机器人能够根据特定的任务和环境进行自适应调整。通过迭代地改变机器人的物理结构和控制策略,可以找到一个最优的组合,从而最大化机器人在特定任务中的性能。这种协同设计的方法能够克服传统方法中机器人结构固定不变的局限性,提高机器人的通用性和适应性。
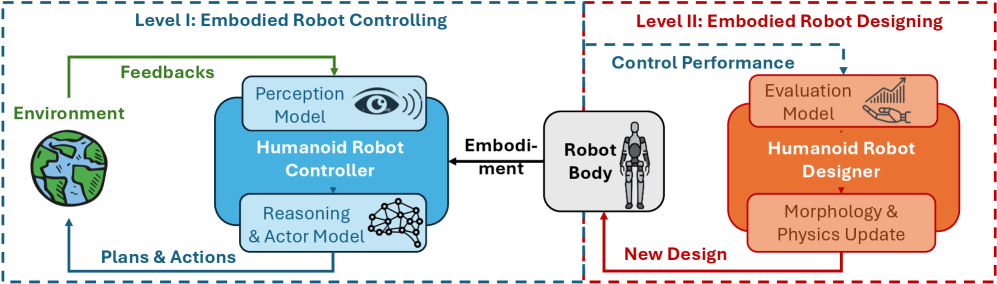
技术框架:论文提出的协同设计框架包含以下几个主要模块:1) 形态生成模块:负责生成不同的机器人形态,可以基于预定义的参数空间进行随机采样,也可以使用进化算法进行优化。2) 控制策略学习模块:负责为给定的机器人形态学习最优的控制策略,可以使用强化学习或其他控制算法。3) 性能评估模块:负责评估机器人在特定任务中的性能,可以使用仿真环境或真实环境进行评估。4) 进化优化模块:负责根据性能评估结果,对机器人形态和控制策略进行优化,可以使用遗传算法或其他优化算法。整个框架通过迭代地执行这四个模块,不断地改进机器人的形态和控制策略,最终找到一个最优的组合。
关键创新:该论文最重要的技术创新点在于提出了形体-控制协同设计的概念,并将其应用于人形机器人领域。与传统的只关注控制策略优化方法不同,该方法同时考虑了机器人形态和控制策略的影响,从而能够更好地适应复杂环境。此外,论文还提出了基于战略探索、Sim2Real迁移和元策略学习的实用协同设计方法,为实际应用提供了指导。
关键设计:论文中涉及的关键设计包括:1) 形态参数化:如何有效地参数化机器人的形态,以便进行优化。2) 性能评估指标:如何定义合适的性能评估指标,以反映机器人在特定任务中的表现。3) 优化算法选择:如何选择合适的优化算法,以有效地搜索最优的机器人形态和控制策略。4) Sim2Real迁移策略:如何将仿真环境中学习到的控制策略迁移到真实机器人上,以避免真实环境中的训练成本。
🖼️ 关键图片
📊 实验亮点
论文提出了基于战略探索、Sim2Real迁移和元策略学习的协同设计方法,并从方法论、应用驱动和社区导向的角度分析了协同设计的关键作用。虽然没有给出具体的实验数据,但论文为未来的研究方向提供了指导,并提出了从短期创新到长期目标的一系列开放性研究问题。
🎯 应用场景
该研究成果可应用于各种需要人形机器人执行复杂任务的场景,例如搜救、灾后重建、医疗辅助、智能制造等。通过协同设计,可以定制出更适应特定任务和环境的机器人,提高其工作效率和安全性。此外,该研究还有助于推动具身智能的发展,使机器人能够更好地理解和适应真实世界。
📄 摘要(原文)
Humanoid robots, as general-purpose physical agents, must integrate both intelligent control and adaptive morphology to operate effectively in diverse real-world environments. While recent research has focused primarily on optimizing control policies for fixed robot structures, this position paper argues for evolving both control strategies and humanoid robots' physical structure under a co-design mechanism. Inspired by biological evolution, this approach enables robots to iteratively adapt both their form and behavior to optimize performance within task-specific and resource-constrained contexts. Despite its promise, co-design in humanoid robotics remains a relatively underexplored domain, raising fundamental questions about its feasibility and necessity in achieving true embodied intelligence. To address these challenges, we propose practical co-design methodologies grounded in strategic exploration, Sim2Real transfer, and meta-policy learning. We further argue for the essential role of co-design by analyzing it from methodological, application-driven, and community-oriented perspectives. Striving to guide and inspire future studies, we present open research questions, spanning from short-term innovations to long-term goals. This work positions co-design as a cornerstone for developing the next generation of intelligent and adaptable humanoid agents.