HumanoidExo: Scalable Whole-Body Humanoid Manipulation via Wearable Exoskeleton
作者: Rui Zhong, Yizhe Sun, Junjie Wen, Jinming Li, Chuang Cheng, Wei Dai, Zhiwen Zeng, Huimin Lu, Yichen Zhu, Yi Xu
分类: cs.RO
发布日期: 2025-10-03
💡 一句话要点
HumanoidExo:通过可穿戴外骨骼实现可扩展的全身人形机器人操作
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture) 支柱七:动作重定向 (Motion Retargeting) 支柱八:物理动画 (Physics-based Animation)
关键词: 人形机器人 外骨骼 运动迁移 策略学习 全身控制
📋 核心要点
- 人形机器人策略学习面临真实世界数据匮乏的挑战,限制了其在复杂环境中的应用。
- HumanoidExo系统通过可穿戴外骨骼将人类运动高效地迁移到人形机器人,缩小具身差距。
- 实验表明,HumanoidExo能显著提升人形机器人在桌面操作、全身操作等任务中的性能,甚至学习新技能。
📝 摘要(中文)
人形机器人策略学习的一个重要瓶颈是获取大规模、多样化的数据集,因为收集可靠的真实世界数据仍然既困难又成本高昂。为了解决这个限制,我们引入了HumanoidExo,这是一种新颖的系统,可以将人类运动转移到全身人形机器人数据。HumanoidExo提供了一种高效的解决方案,最大限度地减少了人类演示者和机器人之间的具身差距,从而解决了全身人形机器人数据稀缺的问题。通过促进收集更大量和多样化的数据集,我们的方法显著提高了人形机器人在动态、真实场景中的性能。我们在三个具有挑战性的真实世界任务中评估了我们的方法:桌面操作、与站立-下蹲运动相结合的操作以及全身操作。我们的结果经验性地表明,HumanoidExo是真实机器人数据的重要补充,因为它使人形机器人策略能够推广到新的环境,仅从五个真实机器人演示中学习复杂的全身控制,甚至仅从HumanoidExo数据中获得新技能(即行走)。
🔬 方法详解
问题定义:人形机器人策略学习需要大量多样化的数据,但真实世界数据的收集成本高昂且困难。现有方法难以有效利用有限的真实数据,导致泛化能力不足,无法适应复杂动态环境。
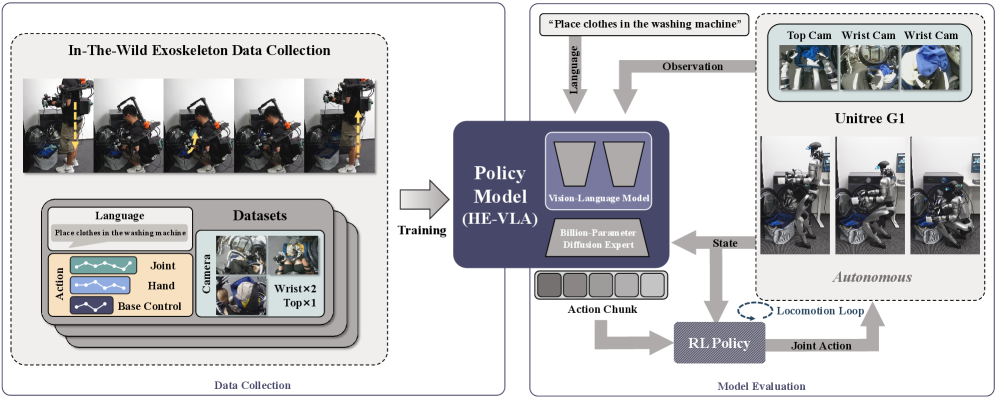
核心思路:HumanoidExo的核心思路是利用可穿戴外骨骼系统,将人类的全身运动高效地迁移到人形机器人上。通过这种方式,可以低成本地生成大量高质量的训练数据,从而弥补真实世界数据的不足。这种方法旨在缩小人类演示者和机器人之间的具身差距,使机器人更容易学习人类的运动技能。
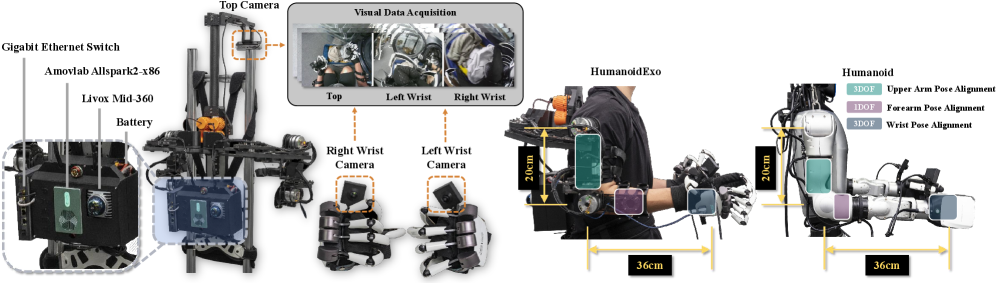
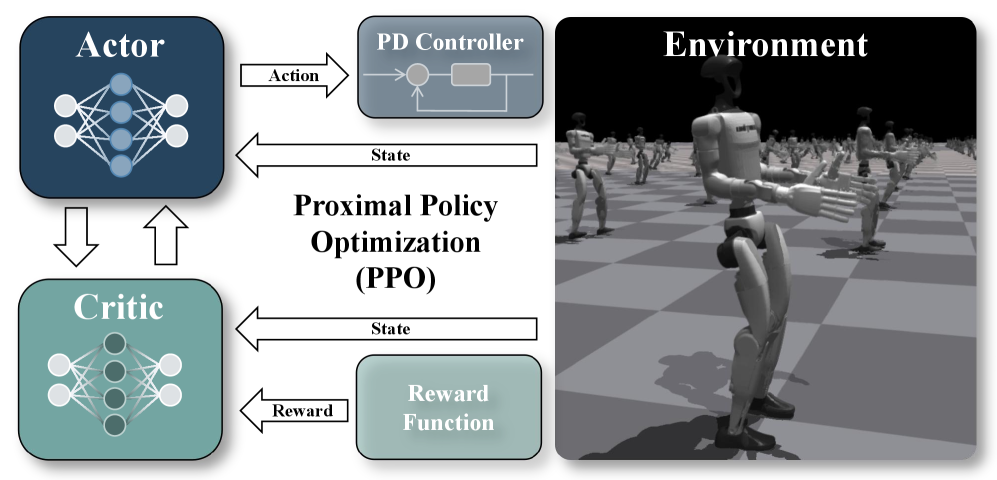
技术框架:HumanoidExo系统包含一个可穿戴外骨骼,用于捕捉人类的全身运动。这些运动数据被映射到人形机器人上,用于训练机器人策略。整个流程包括数据采集、运动映射和策略学习三个主要阶段。数据采集阶段使用外骨骼记录人类的运动数据;运动映射阶段将人类运动数据转换为机器人可执行的动作;策略学习阶段使用这些数据训练人形机器人的控制策略。
关键创新:HumanoidExo的关键创新在于其高效的运动迁移能力和低成本的数据生成方式。与传统的机器人示教方法相比,HumanoidExo能够更快速、更方便地生成大量多样化的训练数据。此外,该系统通过缩小人类和机器人之间的具身差距,提高了机器人策略的学习效率和泛化能力。
关键设计:HumanoidExo的关键设计包括外骨骼的结构设计、运动映射算法和策略学习方法。外骨骼需要能够准确捕捉人类的全身运动,并将其转换为机器人可理解的信号。运动映射算法需要能够有效地将人类运动映射到机器人上,同时考虑到机器人和人类之间的差异。策略学习方法需要能够从大量数据中学习到鲁棒的控制策略,并能够泛化到新的环境。
🖼️ 关键图片
📊 实验亮点
实验结果表明,HumanoidExo能够显著提升人形机器人在真实世界任务中的性能。例如,在桌面操作任务中,使用HumanoidExo数据训练的机器人策略能够更好地泛化到新的环境。更重要的是,该方法仅需5个真实机器人演示,就能学习复杂的全身控制。此外,机器人甚至可以仅从HumanoidExo数据中学习到新的技能,例如行走。
🎯 应用场景
HumanoidExo技术可广泛应用于人形机器人的控制策略学习、远程操作和虚拟现实等领域。在工业制造、医疗康复、灾难救援等场景中,该技术能够帮助人形机器人完成复杂的操作任务,提高工作效率和安全性。此外,该技术还可以用于开发更逼真的虚拟现实体验,使用户能够通过人形机器人与虚拟环境进行交互。
📄 摘要(原文)
A significant bottleneck in humanoid policy learning is the acquisition of large-scale, diverse datasets, as collecting reliable real-world data remains both difficult and cost-prohibitive. To address this limitation, we introduce HumanoidExo, a novel system that transfers human motion to whole-body humanoid data. HumanoidExo offers a high-efficiency solution that minimizes the embodiment gap between the human demonstrator and the robot, thereby tackling the scarcity of whole-body humanoid data. By facilitating the collection of more voluminous and diverse datasets, our approach significantly enhances the performance of humanoid robots in dynamic, real-world scenarios. We evaluated our method across three challenging real-world tasks: table-top manipulation, manipulation integrated with stand-squat motions, and whole-body manipulation. Our results empirically demonstrate that HumanoidExo is a crucial addition to real-robot data, as it enables the humanoid policy to generalize to novel environments, learn complex whole-body control from only five real-robot demonstrations, and even acquire new skills (i.e., walking) solely from HumanoidExo data.