Real-Time Nonlinear Model Predictive Control of Heavy-Duty Skid-Steered Mobile Platform for Trajectory Tracking Tasks
作者: Alvaro Paz, Pauli Mustalahti, Mohammad Dastranj, Jouni Mattila
分类: cs.RO
发布日期: 2025-10-03
💡 一句话要点
提出一种重型滑移转向移动平台实时非线性模型预测控制方法,用于轨迹跟踪任务。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 非线性模型预测控制 滑移转向移动平台 轨迹跟踪 多重打靶法 实时控制
📋 核心要点
- 现有滑移转向移动平台的轨迹跟踪控制在不确定性和扰动下难以保证实时性和稳定性。
- 采用多重打靶非线性模型预测控制框架,结合传感器数据,提升控制器的实时性和精度。
- 实验结果表明,该控制器在速度和精度方面均优于现有非线性模型预测控制器。
📝 摘要(中文)
本文提出了一种用于重型滑移转向移动平台轨迹跟踪的实时最优控制框架。控制器精确的实时性能对于安全至关重要,尤其是在受不确定性和扰动影响的动态系统中,控制器应补偿这些现象以提供稳定的性能。本文提出了一种多重打靶非线性模型预测控制框架。该框架受益于合适的算法以及来自各种传感器的读数,从而实现真正高精度实时性能。该控制器经过测试,可以跟踪不同的轨迹,并在速度和精度方面表现出非常理想的性能。与文献中已有的在滑移转向移动平台上实现的非线性模型预测控制器相比,该控制器显示出显著的改进。
🔬 方法详解
问题定义:论文旨在解决重型滑移转向移动平台在复杂环境下的精确轨迹跟踪问题。现有方法,特别是已有的非线性模型预测控制(NMPC)方法,在实时性和应对外部扰动方面存在不足,难以保证控制系统的稳定性和安全性。
核心思路:论文的核心思路是利用多重打靶法(Multiple Shooting)优化非线性模型预测控制(NMPC)的计算效率,并结合传感器数据实时校正模型,从而提高控制器的实时性和鲁棒性。通过预测未来一段时间内的系统状态,并优化控制输入,使平台能够精确跟踪目标轨迹。
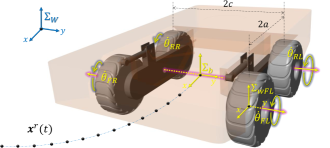
技术框架:该框架主要包含以下几个模块:1) 传感器数据采集模块,用于获取平台的状态信息和环境信息;2) 状态估计模块,用于融合传感器数据,估计平台的当前状态;3) 非线性模型预测控制模块,基于平台动力学模型和目标轨迹,预测未来一段时间内的平台状态,并优化控制输入;4) 控制执行模块,将优化后的控制输入作用于平台。多重打靶法用于求解NMPC问题,将优化问题分解为多个较小的子问题,并行求解,从而提高计算效率。
关键创新:该论文的关键创新在于将多重打靶法应用于重型滑移转向移动平台的非线性模型预测控制,显著提高了控制器的实时性。此外,结合传感器数据实时校正模型,增强了控制器对外部扰动的鲁棒性。
关键设计:关键设计包括:1) 精确的平台动力学模型,考虑了滑移转向的非线性特性;2) 多重打靶法的参数设置,例如子问题的数量和优化算法的选择;3) 损失函数的设计,用于衡量预测轨迹与目标轨迹之间的偏差,以及控制输入的代价;4) 传感器数据的融合策略,用于提高状态估计的精度。
🖼️ 关键图片

📊 实验亮点
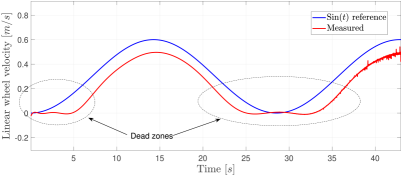
实验结果表明,所提出的控制器在轨迹跟踪任务中表现出优异的性能,与现有的非线性模型预测控制器相比,在速度和精度方面均有显著提升。具体的性能数据(例如跟踪误差、响应时间等)未在摘要中明确给出,但强调了其显著的改进。
🎯 应用场景
该研究成果可应用于各种需要高精度轨迹跟踪的重型滑移转向移动平台,例如建筑工地、矿山、农业等领域的自动化设备。通过提高控制系统的实时性和鲁棒性,可以提高作业效率,降低安全风险,并实现更高级别的自主化。
📄 摘要(原文)
This paper presents a framework for real-time optimal controlling of a heavy-duty skid-steered mobile platform for trajectory tracking. The importance of accurate real-time performance of the controller lies in safety considerations of situations where the dynamic system under control is affected by uncertainties and disturbances, and the controller should compensate for such phenomena in order to provide stable performance. A multiple-shooting nonlinear model-predictive control framework is proposed in this paper. This framework benefits from suitable algorithm along with readings from various sensors for genuine real-time performance with extremely high accuracy. The controller is then tested for tracking different trajectories where it demonstrates highly desirable performance in terms of both speed and accuracy. This controller shows remarkable improvement when compared to existing nonlinear model-predictive controllers in the literature that were implemented on skid-steered mobile platforms.