Point Cloud-Based Control Barrier Functions for Model Predictive Control in Safety-Critical Navigation of Autonomous Mobile Robots
作者: Faduo Liang, Yunfeng Yang, Shi-Lu Dai
分类: cs.RO
发布日期: 2025-10-03
备注: 8 pages, 8 figures, accepted to IROS2025
💡 一句话要点
提出基于点云和控制障碍函数的模型预测控制算法,用于自主移动机器人的安全导航。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 自主导航 移动机器人 模型预测控制 控制障碍函数 点云处理 动态避障
📋 核心要点
- 现有自主导航方法在复杂动态环境中难以保证安全,尤其是在精确预测障碍物未来状态方面存在挑战。
- 该论文提出结合点云数据、卡尔曼滤波预测和控制障碍函数(CBF)的MPC算法,确保机器人安全避开静态和动态障碍物。
- 实验结果表明,该方法在仿真和真实环境中均能有效避障,且在安全性和鲁棒性方面优于基线方法。
📝 摘要(中文)
本文提出了一种新的运动规划算法,旨在促进自主移动机器人的安全关键导航。该算法集成了实时动态障碍物跟踪和映射系统,将点云分为动态和静态两部分。对于动态点云,采用卡尔曼滤波器估计和预测其运动状态。基于这些预测,外推动态点云的未来状态,并将其与静态点云合并,构建前向时域(FTD)地图。通过将控制障碍函数(CBF)与非线性模型预测控制相结合,该算法使机器人能够有效地避开静态和动态障碍物。CBF约束基于预测的未来状态与FTD地图之间的碰撞检测识别的风险点制定。模拟和真实场景的实验结果表明了该算法在复杂环境中的有效性。在仿真实验中,该算法与两种基线方法进行了比较,在避障的安全性和鲁棒性方面表现出优越的性能。源代码已发布,供机器人社区参考。
🔬 方法详解
问题定义:自主移动机器人在复杂动态环境中安全导航是一个关键问题。现有方法在处理动态障碍物时,往往难以准确预测其未来状态,导致避障策略不够安全或过于保守,影响导航效率。尤其是在点云数据处理方面,如何有效区分和预测动态障碍物,并将其融入运动规划中是一个挑战。
核心思路:该论文的核心思路是将点云数据处理、动态障碍物预测和控制障碍函数(CBF)融入到模型预测控制(MPC)框架中。通过点云数据区分静态和动态障碍物,利用卡尔曼滤波器预测动态障碍物的未来状态,然后结合CBF构建安全约束,确保MPC在规划路径时能够避开障碍物,从而实现安全导航。
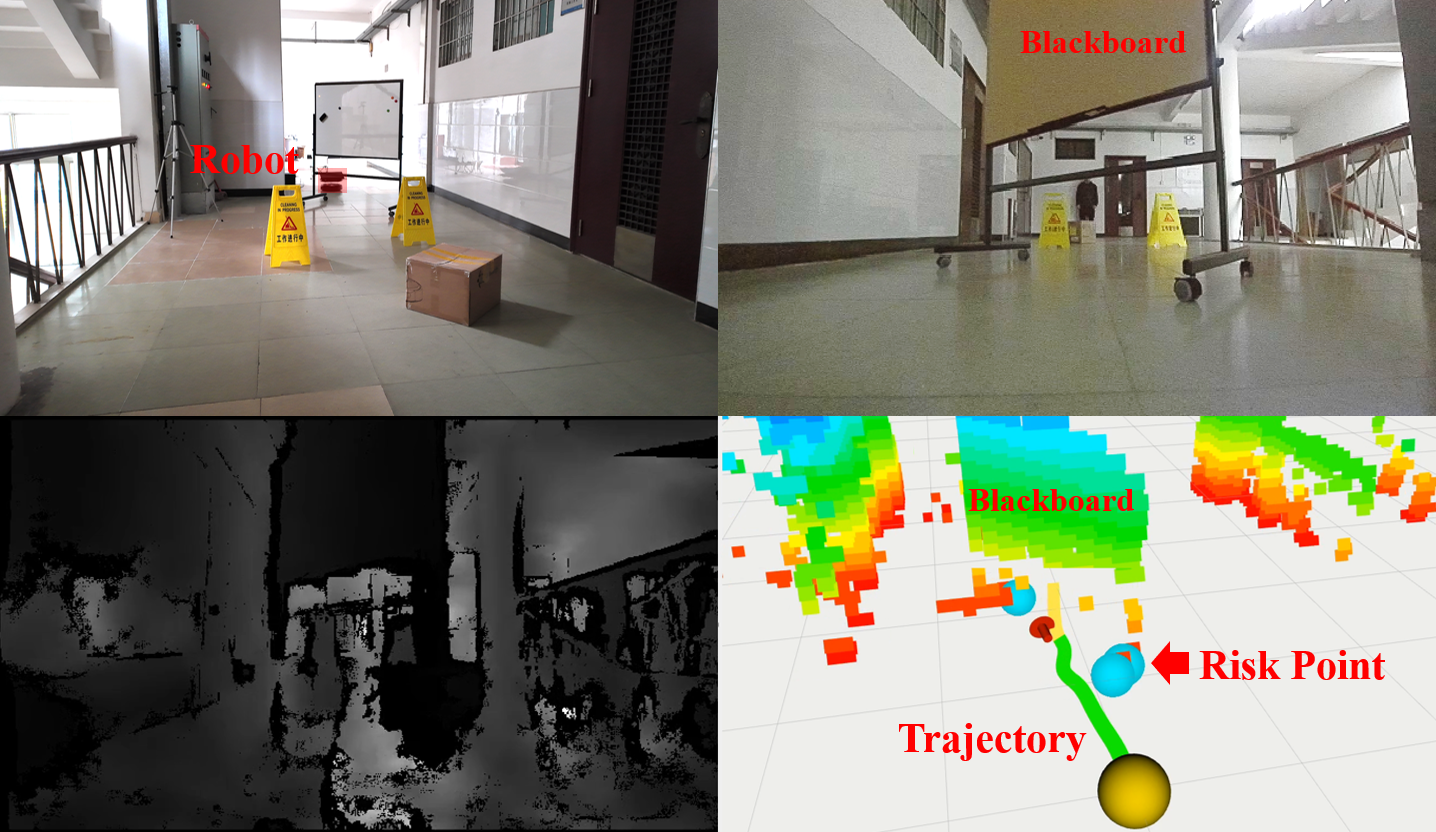
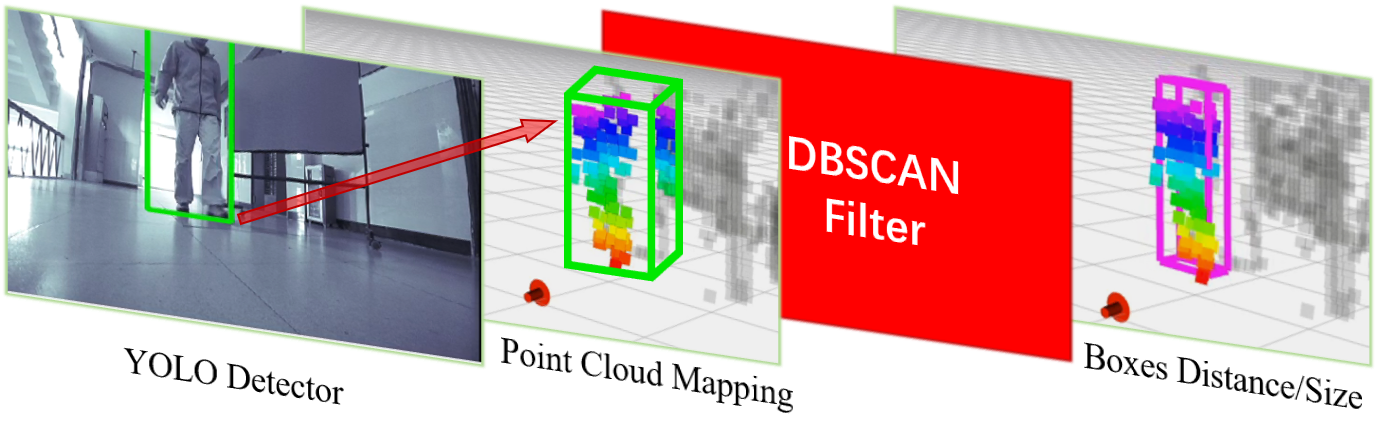
技术框架:整体流程包括:1) 实时获取点云数据;2) 将点云数据分为静态和动态部分;3) 使用卡尔曼滤波器对动态点云进行状态估计和预测;4) 基于预测的动态点云和静态点云构建前向时域(FTD)地图;5) 基于FTD地图和控制障碍函数(CBF)构建MPC问题;6) 求解MPC问题,得到控制指令,驱动机器人运动。
关键创新:该论文的关键创新在于将点云数据处理、动态障碍物预测和控制障碍函数(CBF)有效地结合到MPC框架中。通过实时点云数据处理和动态障碍物预测,能够更准确地估计环境状态,从而提高避障的安全性。同时,利用CBF构建安全约束,能够保证MPC在规划路径时满足安全要求。
关键设计:关键设计包括:1) 使用卡尔曼滤波器进行动态障碍物状态估计和预测,需要合理设置卡尔曼滤波器的参数,以保证预测的准确性;2) 基于FTD地图和控制障碍函数(CBF)构建MPC问题,需要选择合适的CBF函数,并合理设置CBF约束的参数,以保证避障的安全性和导航效率;3) MPC的优化目标需要综合考虑导航效率和安全性,例如可以同时优化路径长度和与障碍物的距离。
🖼️ 关键图片

📊 实验亮点
仿真实验表明,该算法在避障的安全性和鲁棒性方面优于两种基线方法。具体来说,该算法能够有效地避开静态和动态障碍物,并且在障碍物运动速度较快的情况下,仍然能够保持较高的安全性。此外,真实环境下的实验也验证了该算法的有效性。
🎯 应用场景
该研究成果可应用于各种自主移动机器人,如仓库物流机器人、自动驾驶汽车、无人机等。在这些场景中,机器人需要在复杂动态环境中安全高效地完成任务。该方法能够提高机器人在复杂环境中的适应性和安全性,具有重要的实际应用价值和广阔的应用前景。
📄 摘要(原文)
In this work, we propose a novel motion planning algorithm to facilitate safety-critical navigation for autonomous mobile robots. The proposed algorithm integrates a real-time dynamic obstacle tracking and mapping system that categorizes point clouds into dynamic and static components. For dynamic point clouds, the Kalman filter is employed to estimate and predict their motion states. Based on these predictions, we extrapolate the future states of dynamic point clouds, which are subsequently merged with static point clouds to construct the forward-time-domain (FTD) map. By combining control barrier functions (CBFs) with nonlinear model predictive control, the proposed algorithm enables the robot to effectively avoid both static and dynamic obstacles. The CBF constraints are formulated based on risk points identified through collision detection between the predicted future states and the FTD map. Experimental results from both simulated and real-world scenarios demonstrate the efficacy of the proposed algorithm in complex environments. In simulation experiments, the proposed algorithm is compared with two baseline approaches, showing superior performance in terms of safety and robustness in obstacle avoidance. The source code is released for the reference of the robotics community.