SIMSplat: Predictive Driving Scene Editing with Language-aligned 4D Gaussian Splatting
作者: Sung-Yeon Park, Adam Lee, Juanwu Lu, Can Cui, Luyang Jiang, Rohit Gupta, Kyungtae Han, Ahmadreza Moradipari, Ziran Wang
分类: cs.RO, cs.AI, cs.CL, cs.CV
发布日期: 2025-10-02
🔗 代码/项目: PROJECT_PAGE
💡 一句话要点
SIMSplat:提出语言对齐的4D高斯溅射,用于预测性驾驶场景编辑。
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱三:空间感知与语义 (Perception & Semantics) 支柱七:动作重定向 (Motion Retargeting) 支柱八:物理动画 (Physics-based Animation)
关键词: 驾驶场景编辑 高斯溅射 自然语言控制 多智能体运动预测 自动驾驶 场景重建
📋 核心要点
- 现有驾驶场景编辑框架在生成逼真场景时面临效率瓶颈,主要受限于编辑能力不足,难以实现精细化控制。
- SIMSplat的核心在于利用语言对齐的4D高斯溅射,实现自然语言控制的场景编辑,并支持对象级别的精确操作。
- 实验结果表明,SIMSplat在Waymo数据集上展现了强大的场景编辑能力和泛化性,能够有效处理各种驾驶场景。
📝 摘要(中文)
本文提出了一种名为SIMSplat的预测性驾驶场景编辑器,它使用语言对齐的高斯溅射技术。与传统的虚拟驾驶模拟器相比,该方法利用传感器数据进行驾驶场景操作,更具优势。现有框架由于编辑能力有限,难以高效地生成逼真的场景。SIMSplat通过语言控制编辑,使用自然语言提示进行直观的操作。通过将语言与高斯重建的场景对齐,SIMSplat支持直接查询道路对象,从而实现精确和灵活的编辑。该方法提供详细的对象级别编辑,包括添加新对象和修改车辆及行人的轨迹,同时结合多智能体运动预测进行预测性路径优化,以生成场景中所有智能体之间逼真的交互。在Waymo数据集上的实验证明了SIMSplat广泛的编辑能力和在各种场景中的适应性。
🔬 方法详解
问题定义:现有驾驶场景编辑方法难以高效生成逼真场景,缺乏精细的对象级别控制能力,并且难以模拟智能体之间的真实交互。传统虚拟驾驶模拟器成本高昂,且难以复现真实世界的复杂性。
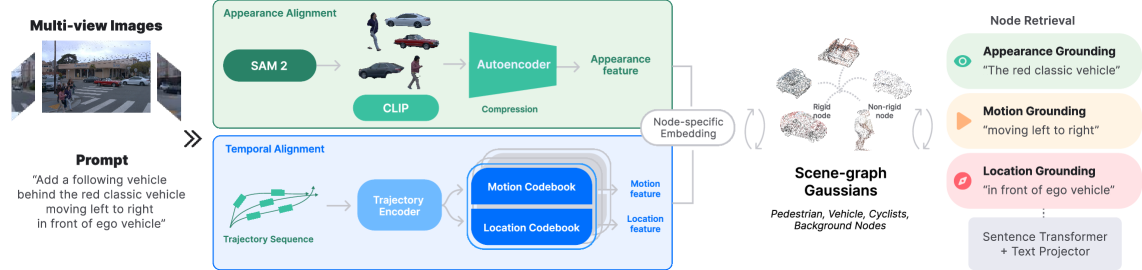
核心思路:SIMSplat的核心思路是将驾驶场景表示为4D高斯溅射,并利用自然语言提示来控制场景的编辑。通过将语言与高斯溅射表示对齐,可以实现对场景中特定对象的查询和操作,从而实现精细化的场景编辑。此外,利用多智能体运动预测来优化智能体的轨迹,从而生成更逼真的交互。
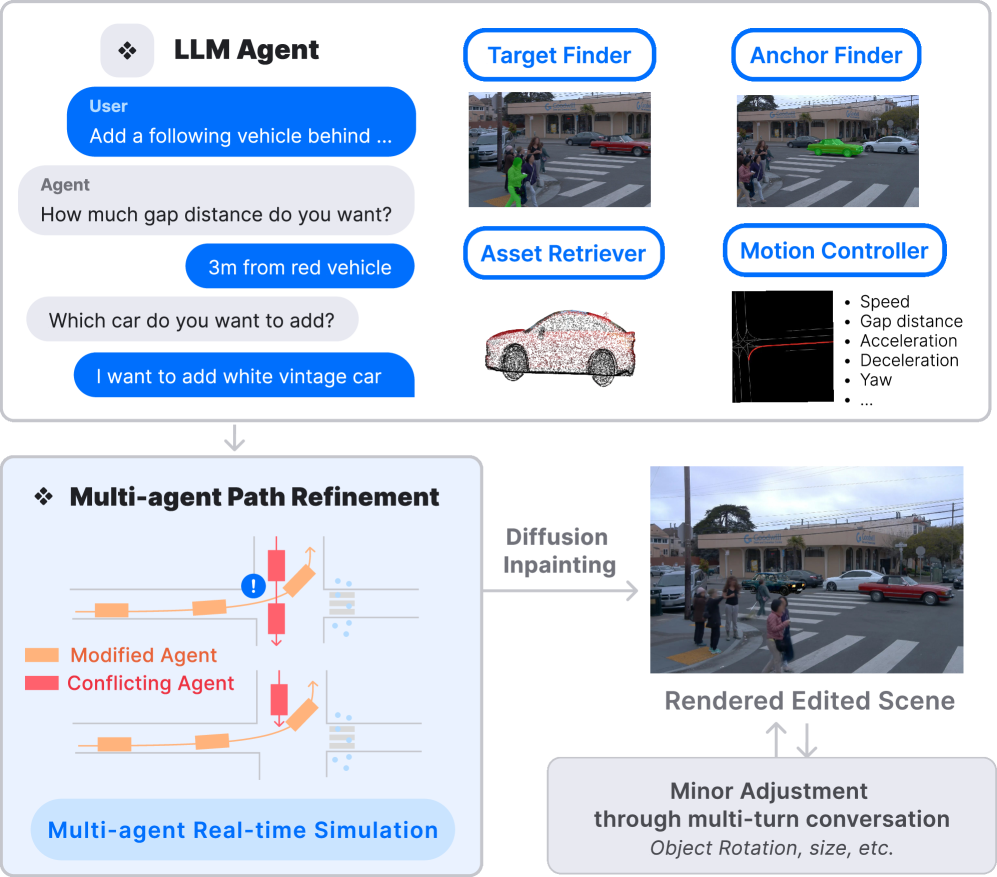
技术框架:SIMSplat包含以下主要模块:1) 基于传感器数据的场景重建模块,使用高斯溅射将场景表示为一组4D高斯分布;2) 语言对齐模块,将自然语言提示与场景中的对象关联起来;3) 场景编辑模块,根据语言提示对场景进行修改,包括添加、删除和修改对象;4) 运动预测模块,预测场景中智能体的未来轨迹,并优化其路径以避免碰撞。
关键创新:SIMSplat的关键创新在于:1) 提出了一种基于语言对齐的4D高斯溅射的场景表示方法,能够实现精细化的对象级别编辑;2) 结合多智能体运动预测,生成更逼真的智能体交互;3) 利用自然语言提示进行场景编辑,使得操作更加直观和灵活。
关键设计:SIMSplat使用预训练的语言模型(如CLIP)将自然语言提示编码为向量表示,并将其与高斯溅射表示中的对象特征进行匹配。场景编辑模块使用可微分渲染技术,根据修改后的高斯溅射表示生成新的场景图像。运动预测模块使用Transformer网络预测智能体的未来轨迹,并使用碰撞避免损失函数优化其路径。
🖼️ 关键图片
📊 实验亮点
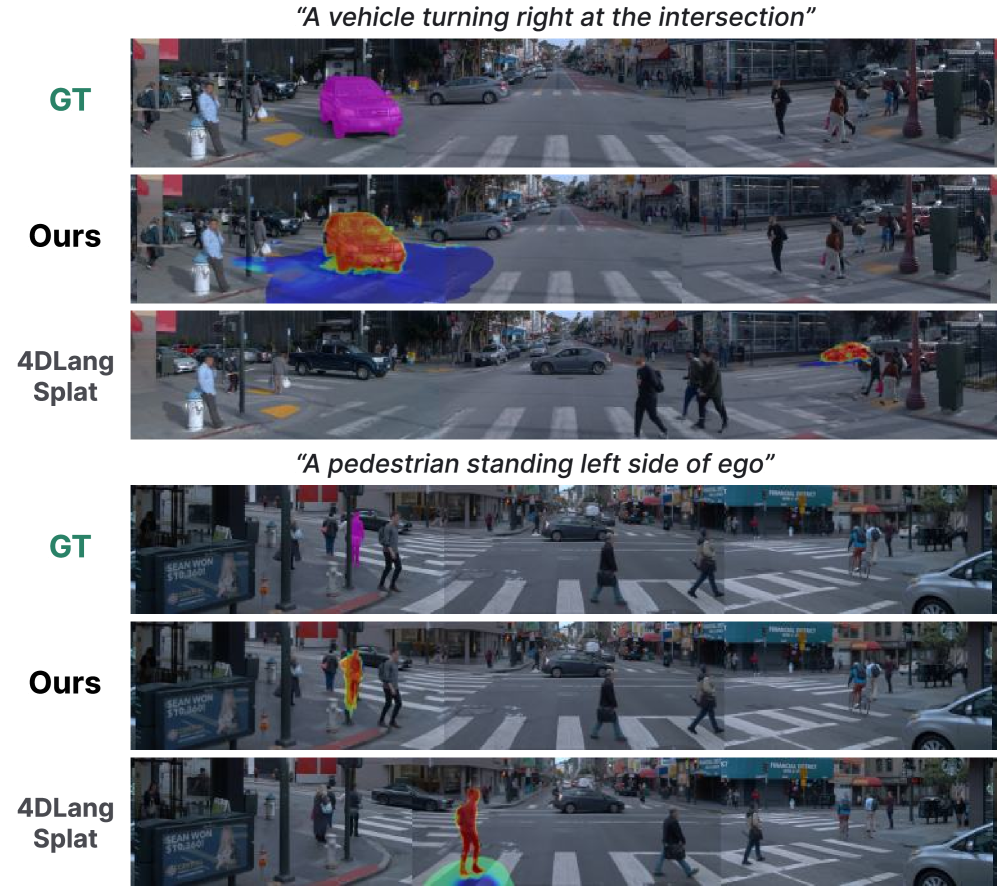
SIMSplat在Waymo数据集上进行了实验,结果表明其能够生成逼真的驾驶场景,并实现精细化的对象级别编辑。通过与现有方法进行对比,SIMSplat在场景编辑的质量和效率方面均取得了显著提升。例如,SIMSplat能够以更高的精度添加和修改场景中的车辆和行人,并生成更逼真的智能体交互。
🎯 应用场景
SIMSplat可应用于自动驾驶系统的开发和测试,通过生成各种逼真的驾驶场景,帮助评估和改进自动驾驶算法的性能。此外,它还可以用于驾驶员培训、交通仿真和游戏开发等领域,具有广泛的应用前景和实际价值。未来,该技术有望进一步提升驾驶场景编辑的效率和真实感,为自动驾驶技术的发展提供有力支持。
📄 摘要(原文)
Driving scene manipulation with sensor data is emerging as a promising alternative to traditional virtual driving simulators. However, existing frameworks struggle to generate realistic scenarios efficiently due to limited editing capabilities. To address these challenges, we present SIMSplat, a predictive driving scene editor with language-aligned Gaussian splatting. As a language-controlled editor, SIMSplat enables intuitive manipulation using natural language prompts. By aligning language with Gaussian-reconstructed scenes, it further supports direct querying of road objects, allowing precise and flexible editing. Our method provides detailed object-level editing, including adding new objects and modifying the trajectories of both vehicles and pedestrians, while also incorporating predictive path refinement through multi-agent motion prediction to generate realistic interactions among all agents in the scene. Experiments on the Waymo dataset demonstrate SIMSplat's extensive editing capabilities and adaptability across a wide range of scenarios. Project page: https://sungyeonparkk.github.io/simsplat/