Stand Up, NAO! Increasing the Reliability of Stand-Up Motions Through Error Compensation in Position Control
作者: Philip Reichenberg, Tim Laue
分类: cs.RO
发布日期: 2025-10-02
💡 一句话要点
针对NAO机器人,提出基于误差补偿的站立运动可靠性提升方案
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 人形机器人 站立运动 误差补偿 NAO机器人 机器人足球
📋 核心要点
- 人形机器人足球赛中,自主站立是关键能力,但现有方法在关节位置误差较大时容易失败。
- 该方案通过特殊运动释放卡住肢体,并利用关节误差补偿机制,提升站立运动的鲁棒性。
- 实验结果表明,该方法显著提高了NAO机器人的站立成功率,并被其他团队成功复用。
📝 摘要(中文)
本文介绍了针对NAO机器人的站立运动方案。在人形机器人足球比赛中,自主站立能力至关重要。该方案自2019年开始使用,并在过去六年里经过评估和改进。我们认为站立失败的主要原因是执行的关节位置存在较大误差。通过执行特殊动作来释放卡住的肢体(如手臂),或通过其他关节补偿较大的误差,我们显著提高了站立程序的整体成功率。本文提出的运动也被标准平台联赛中的其他几个团队使用,并且通过对多个比赛视频的分析表明,他们也获得了类似的成功率。
🔬 方法详解
问题定义:NAO机器人在站立过程中,由于各种因素(例如地面摩擦、自身平衡控制不足、外部干扰等)导致实际执行的关节位置与期望位置存在偏差,从而导致站立失败。现有的站立方法对这些误差的鲁棒性不足,容易陷入局部最优或直接倒地。
核心思路:核心思路是通过主动检测和补偿关节位置误差来提高站立运动的可靠性。具体来说,首先检测是否出现手臂卡住等情况,然后执行特定的“解卡”动作。其次,通过调整其他关节的角度,来补偿主要关节的误差,从而维持平衡并完成站立动作。这种方法的核心在于实时误差感知和动态补偿。
技术框架:该站立运动方案包含以下几个主要阶段:1. 初始姿态调整:将机器人调整到预备站立的初始姿态。2. 误差检测:检测是否存在关节卡住或位置误差过大的情况。3. 误差补偿:如果检测到误差,则执行相应的补偿动作,包括“解卡”动作和关节角度调整。4. 站立执行:执行主要的站立运动。5. 平衡维持:在站立过程中,持续调整关节角度以维持平衡。整个过程是一个闭环控制系统,不断检测和补偿误差。
关键创新:该方法最重要的创新点在于其误差补偿机制。传统的站立运动通常依赖于预先设定的轨迹,对误差的容忍度较低。而该方法通过实时检测和补偿误差,显著提高了站立运动的鲁棒性。此外,针对手臂卡住等特殊情况,设计了专门的“解卡”动作,进一步提高了站立的成功率。
关键设计:关键设计包括:1. 误差检测阈值:需要设置合适的阈值来判断关节位置误差是否过大,以及是否需要执行补偿动作。2. 补偿策略:针对不同的误差情况,需要设计不同的补偿策略,包括选择哪些关节进行调整,以及调整的幅度。3. 平衡控制算法:在站立过程中,需要使用平衡控制算法来维持机器人的平衡,防止倒地。这些参数和算法需要根据NAO机器人的具体特性进行调整和优化。
🖼️ 关键图片


📊 实验亮点
该方法显著提高了NAO机器人的站立成功率,尤其是在存在关节误差的情况下。通过对多个比赛视频的分析表明,采用该方法的团队获得了与论文作者团队相似的站立成功率,验证了该方法的有效性和可复用性。具体的性能数据(例如站立成功率的提升幅度)在摘要中未明确给出,属于未知信息。
🎯 应用场景
该研究成果可广泛应用于人形机器人领域,尤其是在需要机器人具备自主站立能力的场景中,例如机器人足球、搜救、服务等。提高站立的可靠性可以增强机器人的自主性和适应性,使其能够更好地完成各种任务。此外,该方法中的误差补偿思想也可以应用于其他运动控制任务中,例如行走、跑步等。
📄 摘要(原文)
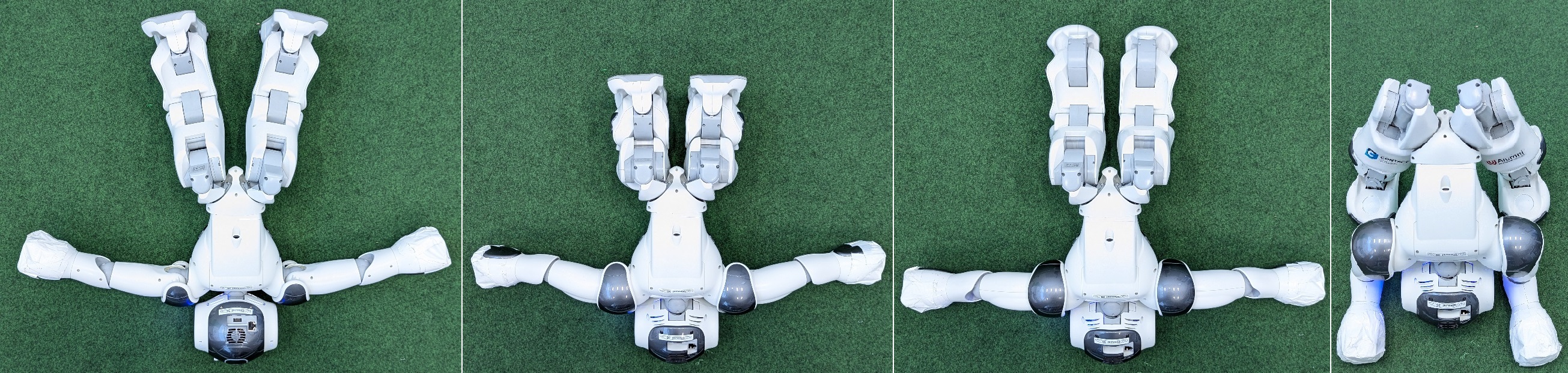
Stand-up motions are an indispensable part of humanoid robot soccer. A robot incapable of standing up by itself is removed from the game for some time. In this paper, we present our stand-up motions for the NAO robot. Our approach dates back to 2019 and has been evaluated and slightly expanded over the past six years. We claim that the main reason for failed stand-up attempts are large errors in the executed joint positions. By addressing such problems by either executing special motions to free up stuck limbs such as the arms, or by compensating large errors with other joints, we significantly increased the overall success rate of our stand-up routine. The motions presented in this paper are also used by several other teams in the Standard Platform League, which thereby achieve similar success rates, as shown in an analysis of videos from multiple tournaments.