SPARC: Spine with Prismatic and Revolute Compliance for Quadruped Robots
作者: Yue Wang
分类: cs.RO, eess.SY
发布日期: 2025-10-02 (更新: 2026-02-02)
💡 一句话要点
SPARC:用于四足机器人的具有棱柱和旋转柔顺性的脊柱模块
🎯 匹配领域: 支柱一:机器人控制 (Robot Control)
关键词: 四足机器人 脊柱柔顺性 阻抗控制 运动效率 开源平台
📋 核心要点
- 现有机器人脊柱缺乏主动柔顺性,难以支持四足动物脊柱弯曲和轴向压缩以提高运动敏捷性和效率的特性。
- SPARC通过紧凑的3自由度矢状面脊柱模块,结合浮动基座阻抗控制,实现了脊柱刚度和阻尼的独立任务空间调整。
- 仿真结果表明,优化后的柔顺性脊柱在高速度下能显著降低功耗,在0.9m/s时降低21%,并开源了该平台。
📝 摘要(中文)
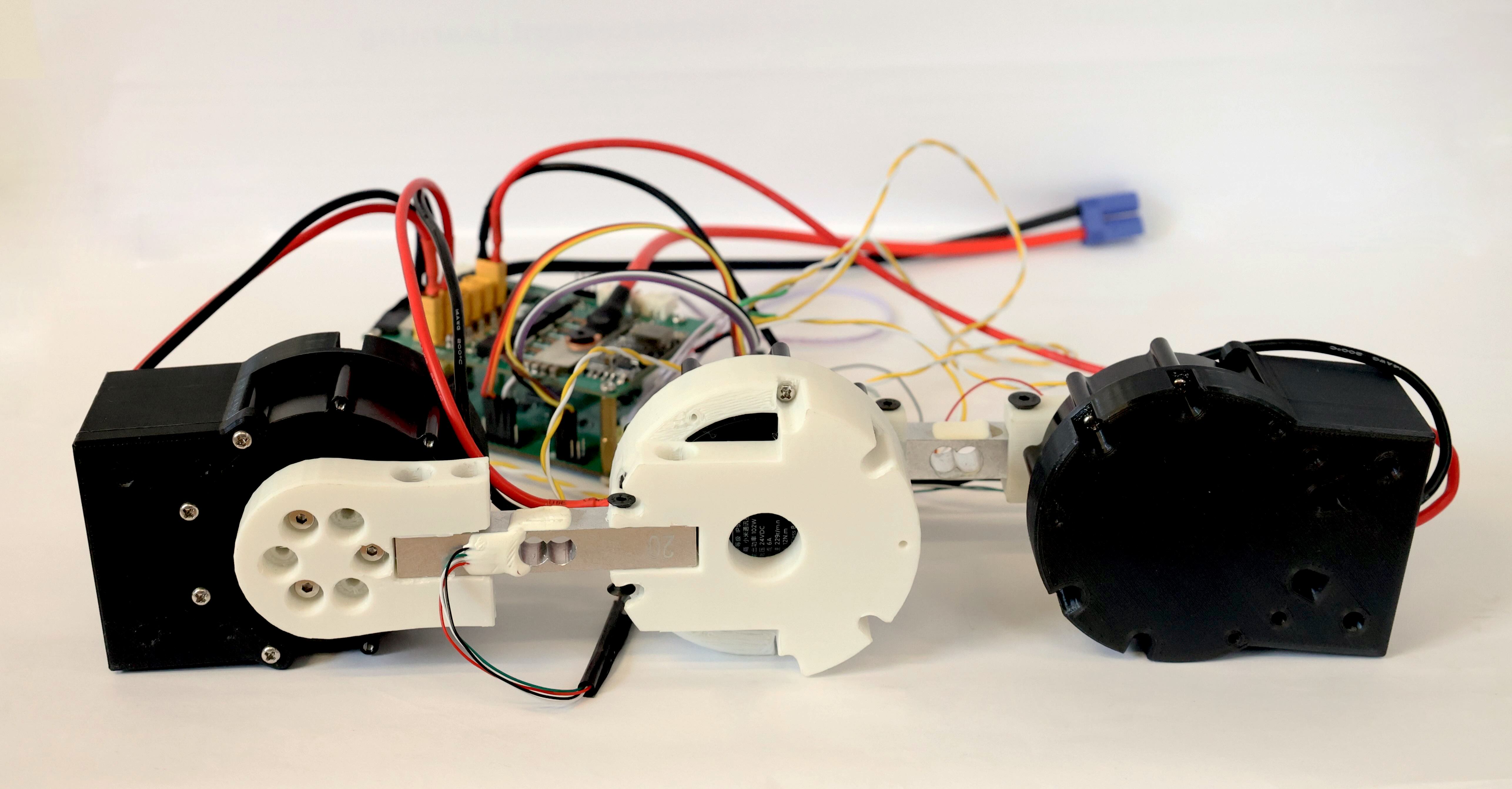
本文提出了一种紧凑的3自由度矢状面脊柱模块SPARC,它能够在1.26公斤的封装内实现同步的旋转和平移运动。通过使用浮动基座阻抗控制器,我们能够独立地在任务空间中调整脊柱的刚度和阻尼,以模拟生物的承重策略。台架实验证实了对指令阻抗的高保真渲染,线性力-位移误差在1.5%以内。系统的运动仿真揭示了一种关键的速度依赖性:虽然低速效率对脊柱属性不敏感,但精确的阻抗调整对于高速性能至关重要。我们的结果表明,与刚性脊柱基线相比,最佳柔顺性脊柱在0.9米/秒的速度下可降低21%的功耗。这种效率的提高在机制上归因于脊柱在增加步长和充当机械低通滤波器以衰减高频扭矩波动方面的作用。SPARC为系统研究腿式运动中脊柱柔顺性提供了一个开源平台。
🔬 方法详解
问题定义:现有四足机器人脊柱设计通常缺乏足够的柔顺性,无法有效模拟生物脊柱在运动过程中弯曲和压缩的能力。这限制了机器人在复杂地形上的运动效率和敏捷性。因此,需要设计一种具有主动柔顺性的脊柱模块,以提高四足机器人的运动性能。
核心思路:SPARC的核心思路是设计一个同时具备旋转和棱柱运动能力的脊柱模块,并通过阻抗控制来实现对脊柱刚度和阻尼的精确调节。这种设计允许机器人脊柱在运动过程中根据需要进行弯曲和伸缩,从而提高运动效率和稳定性。
技术框架:SPARC系统主要包含以下几个模块:1) 机械结构:设计紧凑的3自由度矢状面脊柱模块,实现旋转和平移运动;2) 驱动系统:采用电机和传动机构驱动脊柱的运动;3) 传感器:使用力/力矩传感器测量脊柱受到的力和力矩;4) 控制器:采用浮动基座阻抗控制器,根据期望的阻抗参数和实际的力和力矩,控制脊柱的运动。
关键创新:SPARC的关键创新在于其紧凑的机械设计和浮动基座阻抗控制器的结合。该设计能够在有限的空间内实现脊柱的旋转和平移运动,并通过阻抗控制实现对脊柱刚度和阻尼的精确调节。与传统的刚性脊柱或被动柔顺脊柱相比,SPARC能够更好地模拟生物脊柱的运动特性,从而提高机器人的运动性能。
关键设计:SPARC的关键设计包括:1) 脊柱模块的机械结构设计,需要考虑空间限制、运动范围和承载能力;2) 阻抗控制器的参数选择,需要根据机器人的运动需求和环境条件进行调整;3) 浮动基座的实现方式,需要保证基座的稳定性和精度。
🖼️ 关键图片


📊 实验亮点
SPARC的实验亮点包括:1) 台架实验验证了SPARC能够高保真地渲染指令阻抗,线性力-位移误差在1.5%以内;2) 运动仿真表明,与刚性脊柱相比,优化后的柔顺性脊柱在0.9米/秒的速度下可降低21%的功耗;3) 仿真结果还揭示了脊柱柔顺性对高速运动性能的重要性。
🎯 应用场景
SPARC的研究成果可应用于多种四足机器人应用场景,例如搜索救援、地形勘探和物流运输。通过提高机器人的运动效率和稳定性,SPARC可以帮助机器人在复杂和崎岖的地形上更好地完成任务。此外,SPARC作为一个开源平台,可以促进脊柱柔顺性在腿式运动研究中的应用,推动相关领域的发展。
📄 摘要(原文)
Quadruped mammals coordinate spinal bending and axial compression to enhance locomotion agility and efficiency. However, existing robotic spines typically lack the active compliance required to support such dynamic behaviours. We present SPARC, a compact 3-DoF sagittal-plane spine module that enables simultaneous revolute and prismatic motions within a 1.26 kg package. Using a floating-base impedance controller, we facilitate independent, task-space tuning of spinal stiffness and damping to mimic biological load-bearing strategies. Benchtop experiments confirm high-fidelity rendering of commanded impedance, with linear force-displacement error within 1.5%. Systematic locomotion simulations reveal a critical speed-dependency: while low-speed efficiency is insensitive to spinal properties, precise impedance tuning becomes indispensable for high-speed performance. Our results demonstrate that an optimally compliant spine reduces power consumption by 21% at 0.9 m/s compared to a rigid-spine baseline. This efficiency gain is mechanistically attributed to the spine's role in augmenting stride length and acting as a mechanical low-pass filter to attenuate high-frequency torque fluctuations. SPARC provides an open-source platform for systematic studies of spine compliance in legged locomotion. Available at: github.com/YueWang996/sparc