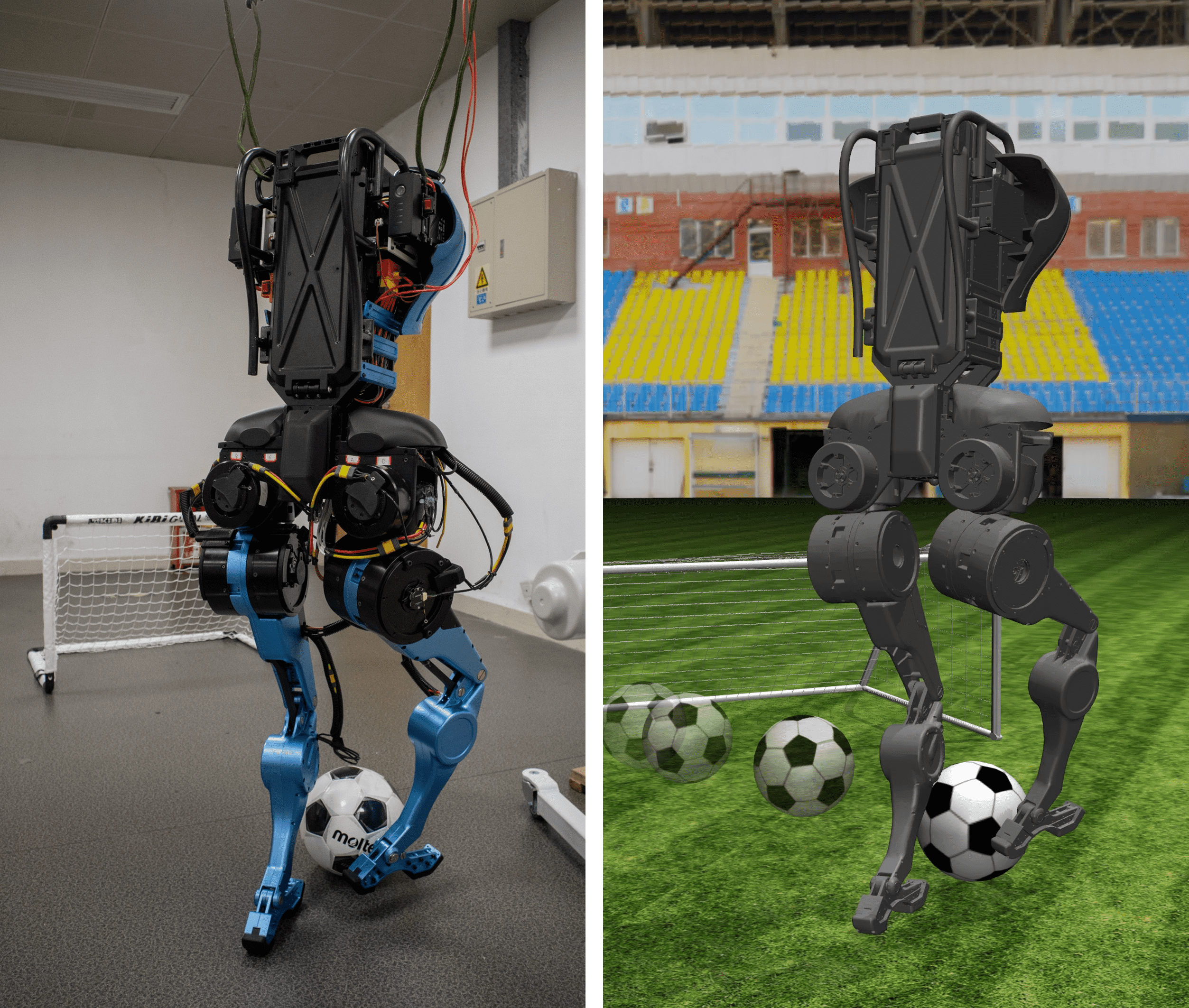
Like Playing a Video Game: Spatial-Temporal Optimization of Foot Trajectories for Controlled Football Kicking in Bipedal Robots
作者: Wanyue Li, Ji Ma, Minghao Lu, Peng Lu
分类: cs.RO
发布日期: 2025-10-02
备注: 8 pages, 8 figures, conference paper
💡 一句话要点
针对双足机器人足球踢球,提出时空优化足部轨迹规划方法
🎯 匹配领域: 支柱一:机器人控制 (Robot Control) 支柱二:RL算法与架构 (RL & Architecture)
关键词: 双足机器人 足球踢球 轨迹规划 时空优化 模型预测控制
📋 核心要点
- 现有双足机器人踢球方法在保持稳定性和精确控制方面存在局限,尤其是在足部轨迹规划上过于简化。
- 该论文提出一种时空轨迹规划方法,能够自主生成满足约束并优化摆动时间的足部轨迹。
- 实验结果表明,该方法生成的轨迹更接近人类踢球行为,且算法高效可靠,任务完成准确率高。
📝 摘要(中文)
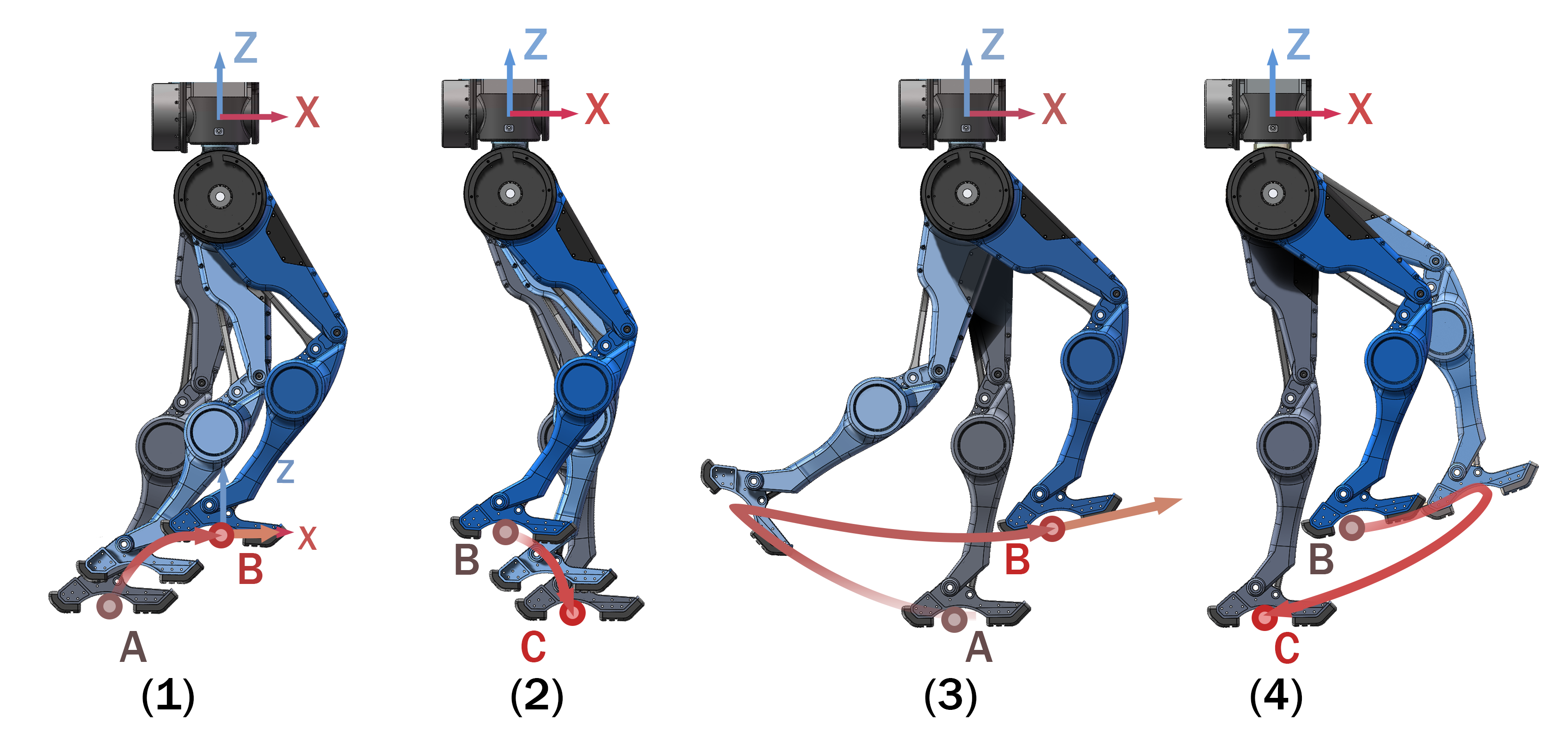
人形机器人足球面临诸多挑战,尤其是在剧烈的踢球运动中保持系统稳定,同时实现精确的球轨迹控制。现有的解决方案,无论是传统的基于位置的控制方法还是强化学习(RL)方法,都存在明显的局限性。模型预测控制(MPC)是普通四足和双足机器人常用的方法。虽然MPC在腿式机器人中表现出优势,但现有的研究通常过度简化腿部摆动过程,仅仅依赖于简单的轨迹插值方法。这严重限制了足部与环境的交互能力,阻碍了诸如踢球之类的任务。本研究创新性地将无人机应用中成功的时空轨迹规划方法应用于双足机器人系统。所提出的方法自主生成满足目标踢球位置、速度和加速度约束的足部轨迹,同时优化摆动阶段的持续时间。实验结果表明,优化后的轨迹与人类的踢球行为非常相似,具有后摆运动。仿真和硬件实验证实了该算法的效率(轨迹规划时间小于1毫秒)和可靠性(当足球目标在-90°到90°范围内时,任务完成准确率接近100%)。
🔬 方法详解
问题定义:现有双足机器人踢球方法,如基于位置的控制或强化学习,难以在剧烈运动中兼顾稳定性和轨迹精度。模型预测控制虽然常用,但对足部摆动过程的建模过于简单,限制了机器人与环境的交互能力,尤其是在踢球等任务中,无法实现复杂自然的足部运动轨迹。
核心思路:借鉴无人机领域的时空轨迹规划方法,将其应用于双足机器人足部轨迹生成。核心在于同时优化足部轨迹的空间形态(位置、速度、加速度)和时间分配(摆动阶段时长),从而生成更自然、高效且满足运动约束的踢球轨迹。这种方法允许机器人自主适应不同的踢球目标和环境条件。
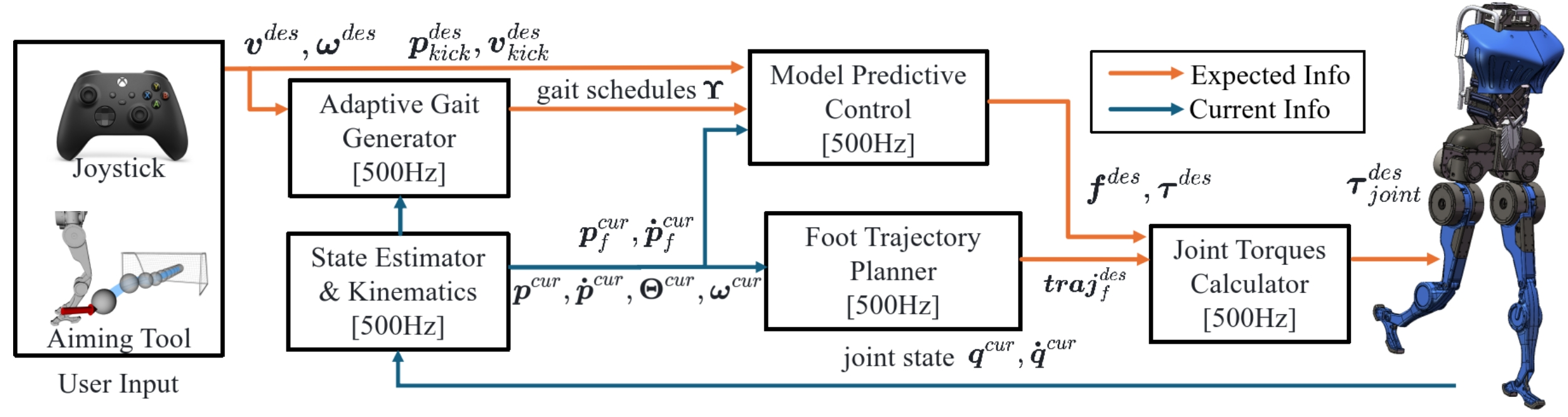
技术框架:该方法包含以下主要阶段:1) 定义踢球任务的目标,包括球的位置、速度和加速度;2) 建立足部运动的动力学模型,考虑各种约束条件;3) 利用时空优化算法,生成满足约束条件并优化摆动阶段时长的足部轨迹;4) 将生成的轨迹发送给机器人控制器,控制机器人执行踢球动作。
关键创新:将时空轨迹规划方法从无人机领域迁移到双足机器人领域,并应用于足球踢球任务。与传统的轨迹插值方法相比,该方法能够自主生成更复杂的足部运动轨迹,例如后摆运动,从而更接近人类的踢球行为。同时优化空间轨迹和时间分配,提高了轨迹的灵活性和适应性。
关键设计:具体的技术细节包括:1) 目标函数的构建,需要同时考虑轨迹的平滑性、运动约束的满足程度以及摆动阶段时长的优化;2) 优化算法的选择,需要考虑算法的计算效率和收敛性;3) 约束条件的设定,需要根据机器人的动力学特性和任务需求进行调整。论文中提到轨迹规划时间小于1ms,表明算法具有很高的计算效率。
🖼️ 关键图片
📊 实验亮点
实验结果表明,该方法生成的足部轨迹与人类踢球行为相似,具有后摆运动。仿真和硬件实验验证了算法的效率,轨迹规划时间小于1毫秒。在足球目标位于-90°到90°范围内时,任务完成准确率接近100%,表明该算法具有很高的可靠性和实用性。
🎯 应用场景
该研究成果可应用于人形机器人足球比赛,提高机器人的运动能力和竞技水平。此外,该方法还可推广到其他需要复杂足部运动的机器人应用中,例如复杂地形行走、攀爬等。通过优化足部轨迹,可以提高机器人的稳定性和运动效率,使其能够更好地适应各种复杂环境。
📄 摘要(原文)
Humanoid robot soccer presents several challenges, particularly in maintaining system stability during aggressive kicking motions while achieving precise ball trajectory control. Current solutions, whether traditional position-based control methods or reinforcement learning (RL) approaches, exhibit significant limitations. Model predictive control (MPC) is a prevalent approach for ordinary quadruped and biped robots. While MPC has demonstrated advantages in legged robots, existing studies often oversimplify the leg swing progress, relying merely on simple trajectory interpolation methods. This severely constrains the foot's environmental interaction capability, hindering tasks such as ball kicking. This study innovatively adapts the spatial-temporal trajectory planning method, which has been successful in drone applications, to bipedal robotic systems. The proposed approach autonomously generates foot trajectories that satisfy constraints on target kicking position, velocity, and acceleration while simultaneously optimizing swing phase duration. Experimental results demonstrate that the optimized trajectories closely mimic human kicking behavior, featuring a backswing motion. Simulation and hardware experiments confirm the algorithm's efficiency, with trajectory planning times under 1 ms, and its reliability, achieving nearly 100 % task completion accuracy when the soccer goal is within the range of -90° to 90°.