Statistical Uncertainty Learning for Robust Visual-Inertial State Estimation
作者: Seungwon Choi, Donggyu Park, Seo-Yeon Hwang, Tae-Wan Kim
分类: cs.RO
发布日期: 2025-10-02
💡 一句话要点
提出基于统计不确定性学习的鲁棒视觉惯性状态估计方法
🎯 匹配领域: 支柱三:空间感知与语义 (Perception & Semantics) 支柱七:动作重定向 (Motion Retargeting)
关键词: 视觉惯性里程计 状态估计 不确定性学习 鲁棒性 自监督学习
📋 核心要点
- 传统VIO方法假设静态、一致的测量不确定性,无法有效应对真实场景中动态变化的误差。
- 该论文提出一种统计框架,利用多视图几何一致性进行自监督学习,在线评估测量可靠性。
- 实验表明,该方法在EuRoC数据集上显著提升了VIO的跟踪精度和鲁棒性,并可实时运行。
📝 摘要(中文)
鲁棒视觉惯性里程计(VIO)的一个根本挑战是动态评估传感器测量的可靠性。这种评估对于正确加权每个测量对状态估计的贡献至关重要。传统方法通常简化这一点,为所有测量假设静态的、一致的不确定性。然而,这种启发式方法可能无法捕捉真实世界数据中固有的动态误差特征。为了改进这一局限性,我们提出了一个统计框架,该框架直接从传感器数据和优化结果中在线学习测量可靠性评估。我们的方法利用多视图几何一致性作为一种自监督形式。这使得系统能够推断地标不确定性,并在优化过程中自适应地加权视觉测量。我们在公共EuRoC数据集上评估了我们的方法,与具有固定不确定性参数的基线方法相比,在平移误差方面平均降低约24%,在旋转误差方面平均降低约42%,从而证明了跟踪精度的提高。由此产生的框架可以实时运行,同时显示出更高的精度和鲁棒性。为了方便重现并鼓励进一步研究,源代码将公开发布。
🔬 方法详解
问题定义:现有的视觉惯性里程计(VIO)方法通常采用固定的、预先设定的不确定性参数来处理传感器测量值。然而,实际应用中,传感器噪声和环境变化会导致测量误差呈现动态变化。这种静态不确定性假设无法准确反映真实误差分布,导致状态估计精度下降,尤其是在恶劣环境下。因此,如何动态评估和调整测量值的可靠性,是提升VIO鲁棒性的关键问题。
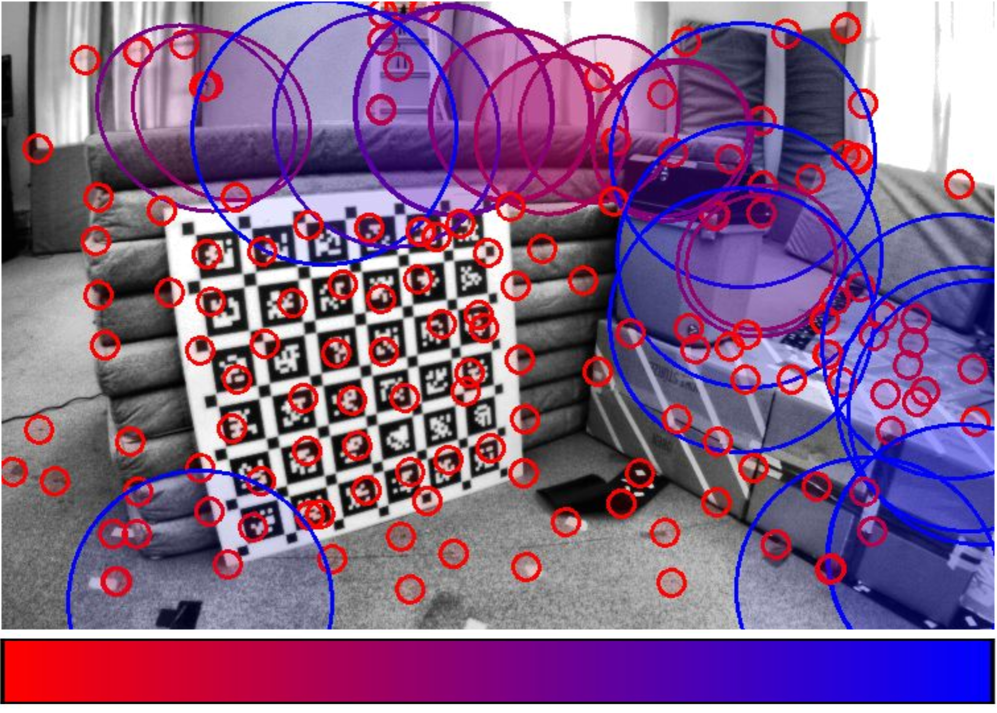
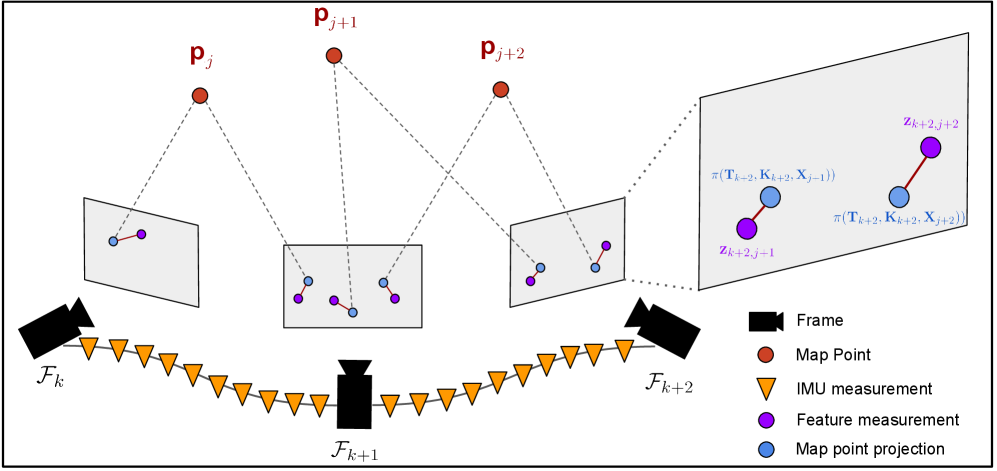
核心思路:该论文的核心思路是利用传感器数据和优化结果,在线学习测量值的统计不确定性。具体而言,通过多视图几何一致性作为自监督信号,系统能够推断地标(landmark)的不确定性,并根据不确定性自适应地调整视觉测量在优化过程中的权重。这种方法避免了手动调整参数的繁琐,并能更好地适应动态变化的环境。
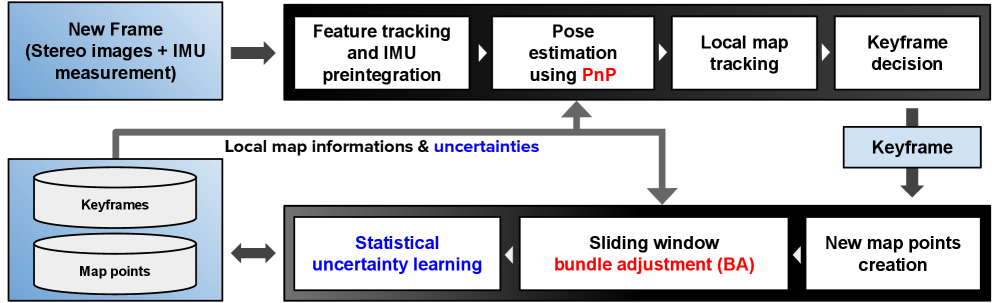
技术框架:该方法主要包含以下几个阶段:1) 传感器数据采集:包括视觉图像和惯性测量单元(IMU)数据;2) 特征提取与匹配:从图像中提取特征点,并在不同图像之间进行匹配;3) 初始状态估计:利用IMU数据进行初始状态估计;4) 优化:构建基于图优化的VIO框架,将视觉和IMU测量值融合,并在线学习测量不确定性;5) 状态更新:根据优化结果更新状态估计。
关键创新:该论文最重要的技术创新在于在线学习测量不确定性的统计框架。与传统方法不同,该方法不依赖于预先设定的固定参数,而是通过自监督学习的方式,动态评估测量值的可靠性。这种方法能够更好地适应动态变化的环境,提高VIO的鲁棒性和精度。
关键设计:该方法利用多视图几何一致性作为自监督信号,通过最小化重投影误差来学习地标的不确定性。具体而言,通过调整视觉测量在优化过程中的权重,使得重投影误差最小化。损失函数的设计考虑了测量不确定性,使得不确定性高的测量值对优化结果的影响较小。此外,该方法还采用了实时优化的策略,保证了系统的实时性。
🖼️ 关键图片
📊 实验亮点
该方法在EuRoC数据集上进行了评估,实验结果表明,与具有固定不确定性参数的基线方法相比,该方法在平移误差方面平均降低约24%,在旋转误差方面平均降低约42%。这些结果表明,该方法能够显著提高VIO的跟踪精度和鲁棒性,并且可以实时运行。
🎯 应用场景
该研究成果可广泛应用于机器人导航、增强现实、无人机自主飞行等领域。通过提高视觉惯性里程计的鲁棒性和精度,可以使机器人在复杂和动态环境中更可靠地定位和导航,从而实现更高级的自主功能。该方法在自动驾驶、移动机器人等领域具有重要的应用价值。
📄 摘要(原文)
A fundamental challenge in robust visual-inertial odometry (VIO) is to dynamically assess the reliability of sensor measurements. This assessment is crucial for properly weighting the contribution of each measurement to the state estimate. Conventional methods often simplify this by assuming a static, uniform uncertainty for all measurements. This heuristic, however, may be limited in its ability to capture the dynamic error characteristics inherent in real-world data. To improve this limitation, we present a statistical framework that learns measurement reliability assessment online, directly from sensor data and optimization results. Our approach leverages multi-view geometric consistency as a form of self-supervision. This enables the system to infer landmark uncertainty and adaptively weight visual measurements during optimization. We evaluated our method on the public EuRoC dataset, demonstrating improvements in tracking accuracy with average reductions of approximately 24\% in translation error and 42\% in rotation error compared to baseline methods with fixed uncertainty parameters. The resulting framework operates in real time while showing enhanced accuracy and robustness. To facilitate reproducibility and encourage further research, the source code will be made publicly available.